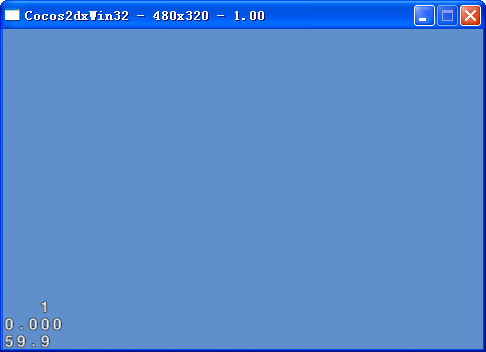
在Cocos2d-x 3.x中使用事件派发机制管理碰撞事件,EventListenerPhysicsContact是碰撞事件监听器。碰撞检测相关的API我们在前面一节介绍过了,下面通过一个实例介绍碰撞检测的实现。这个实例的运行后的场景如图所示,当场景启动后,玩家可以触摸点击屏幕,每次触摸时候,就会在触摸点生成一个新的精灵,精灵的运行是自由落体运动。当这些精灵之间发生接触时候,它们的颜色被设置为黄色,分离后颜色又恢复到原来状态了。
检测碰撞实例
本实例涉及到物理引擎中物体之间的检测碰撞,当两个物体接触到两个物体分离过程中,会发生一些事件,我们可以通过注册监听器EventListenerPhysicsContact来响应这些事件。
首先看一下看HelloWorldScene.h文件,它的代码如下:
- #ifndef__HELLOWORLD_SCENE_H__
- #define__HELLOWORLD_SCENE_H__
- #include"cocos2d.h"
- USING_NS_CC;
- classHelloWorld:publiccocos2d::Layer
- {
- public:
- staticcocos2d::Scene*createScene();
- virtualboolinit();
- virtualboolonTouchBegan(cocos2d::Touch*touch,cocos2d::Event*event);
- virtualvoidonEnter();
- virtualvoidonExit();
- CREATE_FUNC(HelloWorld);
- voidaddNewSpriteAtPosition(Vec2p);
- };
- #endif//__HELLOWORLD_SCENE_H__
上述代码声明了onEnter和onExit函数,用来处理层进入和退出回调函数。我们会在onEnter函数注册EventListenerPhysicsContact监听器,以便于响应碰撞检测事件,在onExit函数中注销这些监听器。
HelloWorldScene.cpp中创建物理世界和指定世界的边界语句是在HelloWorld::createScene()和HelloWorld::init()函数中,这两个函数类似于上一节的HelloPhysicsWorld实例,这里不再解释这些函数代码了。
HelloWorldScene.cpp中与碰撞检测相关的代码是在onEnter和onExit函数中,代码如下: