Day 3:新知——并查集
学习笔记
一、概念
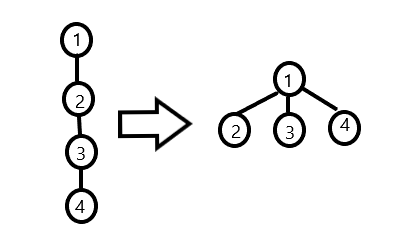
- 概念:用来表示不相交集合的数据结构,处理不相交集合的合并和查询问题。每个集合通过代表来区分。
- 操作:
(1)FindSet (x)
用来查找元素 x 属于哪个集合,返回集合的代表。
(2)UnionSet (x, y)
如果 x 、 y 属于不同集合,则将 x 、 y 所在集合进行合并,否则不进行任何操作/ - 实现方法:有根树表示集合。
二、基本操作
- 初始化
MakeSet
用father[i]表示i的父结点。
void MakeSet () {
for (int i = 1; i <= n; i ++) {
father[i] = i;//若父节点与自己相同,则为根结点。
}
}
- 查询
FindSet
int FindSet (int x) {
if (father[x] == x) {//同上注释
return x;
} else {
return FindSet (father[x]);
}
}
- 合并
UnionSet
void UnionSet () {
if (FindSet (x) == FindSet (y)) {//如果x、y在同一集合,不用合并。
return;
}
father[FindSet (x)] = FindSet[y];//接在y的根结点上。
}
三、并查集优化1——路径压缩
int FindSet (int x) {
if (father[x] == x) {//同上注释
return x;
} else {
return father[x] = FindSet (father[x]);//直接连到根结点。
}
}
四、并查集优化2——按秩合并(启发式合并)
用rank[i]维护以i结点为根的子树的深度。
void UnionSet () {
int a = FindSet (x), b = FindSet (y);
if (a == b) {//如果x、y在同一集合,不用合并。
return;
}
if (rank[a] <= rank[b]) {//如果b树比a树深,把a接在b后
father[a] = b;
} else {//否则把b接在a后
father[b] = a;
}
if (rank[a] == rank[b]) {//如果a和b一样深,根据刚才的语句是接在b后的,则b的深度要加1
rank[b] ++;
}
}
五、带权并查集(边带权并查集)
六、种类并查集(扩展域并查集)
Day 5:新知——树状数组
学习笔记
一、概念
树状数组(Binary Indexed Tree,简称BIT),是一个区间查询和单点修改时间复杂度降为
Θ
(
log
n
)
\Theta (\log n)
Θ(logn)的数据结构,主要用于查询任意两点之间所有元素之和。
二、问题的提出
一个一维数组,长度为 n n n,接下来要对这个数组进行两种操作:
三、解决办法
办法一:前缀和
优点:求和:
Θ
(
1
)
\Theta (1)
Θ(1)。
缺点:修改:
Θ
(
n
)
\Theta (n)
Θ(n)。
办法二:树状数组
重点:lowbit (x)函数
求把 x x x转化成二进制后,取末尾的 1 1 1和后面的 0 0 0,再转化成十进制的值。
写法:
int lowbit (int x) {
return x & -x;
}
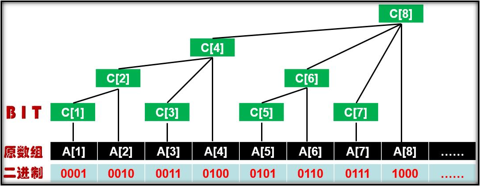
bit[i]数组就是上图中的C[i]数组,按照上图规律:
bit[1] = a[1]
bit[2] = bit[1] + a[2]
bit[3] = a[3]
bit[4] = bit[2] + bit[3] + a[4]
...
重点:update (k, x)函数:将第k个元素的值加x。
void update (int k, int x) {
for (int i = k; i <= n; i += lowbit (i)) {//由上图易得,第i个元素+lowbit (i)即为它的上级元素
bit[i] += x;
}
}
重点:sum (k)函数:求第k个元素的值。
int sum (int k) {
int ans = 0;
for (int i = k; i > 0; i -= lowbit (i)) {//累加差分(bit)数组即为原数
ans += bit[i];
}
return ans;
}
四、离散化
Q:为什么要离散化?
A:在某些时刻,数据较大时且只需知道元素的位置而元素的值无关紧要时,可以使用离散化来简化数据的强度。
离散化方法一:用数组进行离散化
struct node {
int val, id;
bool operator < (const node x) const {
return val < x.val;
}
}
......
for (int i = 1; i <= n; i ++) {
scanf ("%d", &a[i].val);
a[i].id = i;
}
sort (a + 1, a + n + 1);
b[a[i].id] = i;
离散化方法二:用STL+二分离散化
#include <algorithm>
using namespace std;
int a[MAXN], lsh[MAXN], cnt, n;
......
for (int i = 1; i <= n; i ++) {
scanf ("%d", &a[i]);
lsh[i] = a[i];
}
sort (lsh + 1, lsh + n + 1);//排序
cnt = unique (lsh + 1, lsh + n + 1) - lsh - 1;//去重
for (int i = 1; i <= n; i ++) {
a[i] = lower_bound (lsh + 1, lsh + cnt + 1, a[i]) - lsh;//返回坐标
}
Day 8:新知——哈希Hash表
学习笔记
一、Hash函数
指可以根据关键字直接计算出元素所在位置的函数。
二、哈希表
根据设定的哈希函数 Hash(key) 和处理冲突的方法将一组关键字映象到一个有限的连续的地址集(区间)上,并以关键字在地址集中的 “象” 作为记录在表中的存储位置,这种表便称为哈希表,这一映象过程称为哈希造表或散列,所得存储位置称为哈希地址或散列地址。
三、冲突
- 定义:不同的元素占用同一个地址的情况叫做冲突。
- 发生冲突的因素
(1) 装填因子 α \alpha α
装填因子是指哈希表中己存入的元素个数 n n n 与哈希表的大小 m m m 的比值,即 α = n m α=\frac{n}{m} α=mn。 α α α越小,发生冲突的可能性越小,反之,发生冲突的可能性就越大。但是, α α α太小又会造成大量存贮空间的浪费,因此必须兼顾存储空间和冲突两个方面。
(2)所构造的哈希函数
构造好的哈希函数,使冲突尽可能的少。
(3)解决冲突的方法
设计有效解决冲突的方法 。.
四、Hash函数的构造方法
-
直接定址法
取关键字或关键字的某个线性函数值为散列地址,即Hash(K)=K或Hash(K)=a * K + b(其中 a a a、 b b b为常数)。
优点:以关键码key的某个线性函数值为哈希地址,不会产生冲突。
缺点:要占用连续地址空间,空间效率低。 -
除后余数法 (常用)
取关键字被不大于散列表表长 m m m 的数 p p p 除后所得的余数为哈希函数。即
H a s h ( K ) = K m o d p ( p ≤ m ) Hash(K) = K \mod p (p≤m) Hash(K)=Kmodp(p≤m)ps:经验得知,一般可选 p p p为质数 或 不包含小于 20 20 20的质因子的合数。例如:
131, 1331, 13331, ... -
平方取中法
取关键字平方后的中间几位为哈希函数。因为中间几位与数据的每一位都相关。
例: 2589 2589 2589的平方值为 6702921 6702921 6702921,可以取中间的 029 029 029为地址。 -
数字分析法
选用关键字的某几位组合成哈希地址。
选用原则应当是:各种符号在该位上出现的频率大致相同。 -
折叠法
是将关键字按要求的长度分成位数相等的几段,最后一段如不够长可以短些,然后把各段重叠在一起相加并去掉进位,以所得的和作为地址。
适用于:每一位上各符号出现概率大致相同的情况。
具体方法:
移位法:将各部分的最后一位对齐相加(右对齐)。
间接叠加法:从一端向另一端沿分割界来回折叠后,最后一位对齐相加。
例:元素 42751896 42751896 42751896,
移位法: 427 + 518 + 96 = 1041 427+518+96=1041 427+518+96=1041
间接叠加法: 42751896 − > 724 + 518 + 69 = 1311 427 518 96 -> 724+518+69 =1311 42751896−>724+518+69=1311 -
随机数法
选择一个随机函数,取关键字的随机函数值为它的哈希地址,即Hash (key) = random (key)其中random为随机函数(random是C语言函数)。
通常,当关键字长度不等时采用此法构造哈希函数较恰当。rand (): 取随机数,以默认种子1来生成,只要种子一样,无论何时何地生成的随机数都一样。srand (x): 将随机数的种子改为 x x x。time (0): 获取当前时间,因为时间一直在变化,所以随机数的值也在变化。
参考代码:
#include <cstdio>
#include <cstdlib>
#include <ctime>
using namespace std;
int main () {
srand (time (0));
printf ("%d\n", rand ());
return 0;
}
五、处理冲突的办法
-
开放地址法
开放地址就是表中尚未被占用的地址,当新插入的记录所选地址已被占用时,即转而寻找其它尚开放的地址。
(1) 线性探测法
设散列函数Hash (K) = K mod m( m m m为表长),若发生冲突,则沿着一个探查序列逐个探查(也就是加上一个增量),那么,第i次计算冲突的散列地址为:
H i = ( H ( K ) + d i ) m o d m ( d i = 1 , 2 , … , m − 1 ) H_i = (H(K)+d_i) \mod m (d_i=1,2,…,m-1) Hi=(H(K)+di)modm(di=1,2,…,m−1)
优点:只要哈希表未被填满,保证能找到一个空地址单元存放有冲突的元素;
缺点:可能使第 i i i个哈希地址的同义词存入第 i + 1 i+1 i+1 个哈希地址,这样本应存入第 i + 1 i+1 i+1个哈希地
址的元素变成了第 i + 2 i+2 i+2个哈希地址的同义词,……,因此,可能出现很多元素在相邻的哈希
地址上“堆积”起来,大大降低了查找效率。
(2) 二次探测法
二次探测法对应的探查地址序列的计算公式为:
H i = ( H ( k ) + d i ) m o d m H_i = ( H(k) + d_i ) \mod m Hi=(H(k)+di)modm
其中 d i = 1 2 , − 1 2 , 2 2 , − 2 2 , … , j 2 , − j 2 ( j ≤ m / 2 ) d_i =1^2,-1^2,2^2,-2^2,…,j^2,-j^2 (j≤m/2) di=12,−12,22,−22,…,j2,−j2(j≤m/2)。 -
链地址法
基本思想:
将具有相同哈希地址的记录链成一个单链表,m个哈希地址就设 m个单链表,然后用一个数组将m个单链表的表头指针存储起来,形成一个动态的结构。
优点:插入、删除方便。
缺点:占用存储空间多。 -
再哈希法
基本思想:
H i = R H i ( k e y ) ( i = 1 , 2 , 3 , … … , k ) 。 H_i= RH_i(key) (i=1,2,3,……,k)。 Hi=RHi(key)(i=1,2,3,……,k)。
其中,
R
H
i
(
)
RH_i()
RHi() 均是不同的哈希函数,即在同义词产生地址冲突时计算另一个哈希函数地址,直到冲突不再发生。
优点:不易产生“聚集”。
缺点:增加了计算时间。
- 建立一个公共溢出区
基本思想:
假设哈希函数的值域为 [ 0 , m − 1 ] [0,m-1] [0,m−1],则设向量 H a s h T a b l e [ 0 , m − 1 ] HashTable[0,m-1] HashTable[0,m−1]为基本表。在此基础上,再建立一个溢出表,在之后的哈希操作中,无论关键字的同义词生成怎样的哈希地址,一旦发生冲突,就将其放入溢出表中。
Day 10:新知——图的概念、结构和遍历
学习笔记
一、定义
图(graph),用来存储某些具体事物和这些事物中的联系。
图由顶点(vertex)——具体事物和边(edge)——联系组成
顶点集合为
V
V
V,边的集合为
E
E
E,图表示为
G
=
(
V
,
E
)
G=(V,E)
G=(V,E)
二、种类
- 无向图:边没有指定方向的图。
- 有向图:边具有指定方向的图。
注:有向图所连的边也叫做弧,一条边起点为弧头,终点为弧尾。 - 带权图:边上带有权值的图。
三、无向图的术语
- 两个顶点之间有边连接,则称两个顶点相邻。
- 路径:相邻顶点的序列。
- 圈:起点与终点重合的路径。
- 度:顶点连接边的条数。
- 树:没有圈的连通图。
- 森林:没有圈的非连通图。
四、有向图的术语
- 在有向图中,边是单向的,它们的邻接性是单向的。
- 有向路径:相邻顶点的序列。
- 有向环:一条至少含有一条边且起点和终点相同的路径。特别地,自环(见下图)

- 有向无环图(DAG):没有环的有向图。
- 度:一个顶点的出度和入度之和即为该顶点的度。
(1) 入度:以顶点为弧尾的边的数量。
(2) 出度:以顶点为弧头的边的数量。
五、图的表示
-
邻接矩阵
对于一个有 V V V个顶点的图而言,使用 V × V V \times V V×V的二维矩阵表示
G i , j = 1 G_{i,j}=1 Gi,j=1,有边相连
G i , j = 0 G_{i,j}=0 Gi,j=0,无边相连
无向图: G i , j = G j , i = 1 G_{i,j}=G_{j,i}=1 Gi,j=Gj,i=1
优点:可以用常数时间判断是否有边存在
缺点:表示稀疏图时,浪费大量空间。 -
邻接表
用一个不定长数组vector存储G[i]表示与i边有相连的序列。 -
链式前向星
用几个数组来维护边之间的特殊关系。
六、图的遍历
Day 11:新知——最短路
学习笔记
一、概念
最短路径问题就是寻找图中两节点之间的最短路径。
二、Floyd算法
Floyd算法是最简单的最短路径算法,可以计算图中任意两点间的最短路径,但是时间复杂度和空间复杂度极高:
Θ
(
n
3
)
\Theta(n^3)
Θ(n3),且适用于负边权。
-
初始化
定义一个数组f[i][j],表示i点到j点的最短路。
伪代码:
m e m s e t ( f , i n f ) memset(f,inf) memset(f,inf)
f i , i = 0 f_{i,i}=0 fi,i=0
有边相连: f u , v = w u , v f_{u,v}=w_{u,v} fu,v=wu,v
无边相连: f u , v = i n f f_{u,v}=inf fu,v=inf -
算法
void floyd () {
for (int k = 1; k <= n; k ++) {
for (int i = 1; i <= n; i ++) {
for (int j = 1; j <= n; j ++) {
f[i][j] = min (f[i][j], f[i][k] + f[k][j]);
}
}
}
}
| 算法本质 | DP |
|---|---|
| 阶段 | 第 i i i个点经过前 k k k个点中任意若干个点到第 j j j个点 |
| 状态转移方程 | f k , i , j = min ( f k − 1 , i , j , f k − 1 , i , k + f k − 1 , k , j ) f_{k,i,j}=\min(f_{k-1,i,j},f_{k-1,i,k}+f_{k-1,k,j}) fk,i,j=min(fk−1,i,j,fk−1,i,k+fk−1,k,j) |
| 状态转移方程(省去 k k k维) | min ( f i , j , f i , k + f k , j ) \min(f_{i,j},f_{i,k}+f_{k,j}) min(fi,j,fi,k+fk,j) |
- 记录路径
定义pre[i][j]表示从i到j的路径中j的前驱。
- 初始化: p r e i , j = i pre_{i,j}=i prei,j=i(在无向图中 p r e j , i = j pre_{j,i}=j prej,i=j)
- 更新: p r e i , j = p r e k , j pre_{i,j}=pre_{k,j} prei,j=prek,j
三、Dijkstra算法
把结点分成两组:已经确定最短路的结点,尚未确定最短路的结点。
我们不断从第2组中的结点放入第1组并扩展。
本质是贪心,只能应用于正权图。
普通Dijkstra算法的时间复杂度为
Θ
(
O
2
)
\Theta(O^2)
Θ(O2),小根堆优化后时间复杂度为
Θ
(
log
n
)
\Theta(\log n)
Θ(logn)~
Θ
(
log
m
)
\Theta(\log m)
Θ(logm)
- 松弛
做一个形象的比喻,原来用一根橡皮筋直接连接 a a a、 b b b两点,若有一点 k k k使得 a → k → b a→k→b a→k→b比 a → b a→b a→b更短,则改成 a → k → b a→k→b a→k→b,让橡皮筋更松弛。
if (dis[b] > dis[k] + w[k][b]) {
dis[b] = dis[k] + w[k][b];
}
-
初始化
我们设起点为 s s s,终点为 e e e,dis[v]表示从指定 s s s到 v v v的最短路,pre[v]表示 v v v的前驱,用来输出路径。
伪代码:
m e m s e t ( d i s , + ∞ ) memset(dis,+\infty) memset(dis,+∞)
m e m s e t ( v i s , 0 ) memset(vis,0) memset(vis,0)
f o r ( i : 1 for(i:1 for(i:1~ n ) → d i s i = w s , i n)→dis_i=w_{s,i} n)→disi=ws,i
d i s 0 = p r e s = 0 , v i s s = 1 dis_0=pre_s=0,vis_s=1 dis0=pres=0,viss=1 -
算法
f
o
r
(
i
:
1
for(i:1
for(i:1~
n
−
1
)
n-1)
n−1)
(1) 在所有未标记的点中找出
d
i
s
dis
dis最小的
k
k
k
(2) 标记
k
k
k
(3)松弛从
k
k
k出发的边
void dijkstra () {
memset (dis, 0x3f, sizeof dis);
memset (vis, 0, sizeof vis);
for (int i = 1; i <= n; i ++) {
dis[i] = w[s][i];
}
dis[0] = pre[s] = 0, vis[s] = 1;
for (int i = 1; i <= n - 1; i ++) {
int k = -1, minn = 0x3f3f3f3f;
for (int j = 1; j <= n; j ++) {
if (dis[j] < minn) {
k = j, minn = dis[j];
}
}
if (vis[k] == 1) {
continue;
}
vis[k] = 1;
for (int i = 1; i <= n; i ++) {
if (w[i][k] != 0X3f3f3f3f) {
if (dis[i] > dis[k] + w[k][i]) {
dis[i] = dis[k] + w[k][i];
}
}
}
}
}
-
Dijkstra算法堆优化(小根堆)
(1) 找出
d
i
s
dis
dis最小的
k
k
k,我们可以用priority_queue优先队列来完成(优化第一个小循环)
(2) 用邻接表或链式前向星拉出与
k
k
k相邻的边的序列(优化第二个小循环)
priority_queue <pair <int, int> > q;
void dijkstra () {
while (q.size()) {
q.pop();
}
memset (dis, 0x3f, sizeof dis);
dis[s] = 0;
q.push(make_pair (0, s));
while (q.size()) {
int t = q.top().second;
q.pop();
if (vis[t] == 1) {
continue;
}
vis[t] = 1;
for (int i = head[t]; i; i = next[i]) {
int x = to[i], y = w[i];
if (dis[x] > dis[t] + y) {
dis[x] = dis[t] + y;
q.push(make_pair (-dis[x], x));
}
}
}
}
Day 12:新知——最短路
学习笔记
四、Bellman-Ford算法
对每条边执行更新,迭代 N − 1 N-1 N−1次。具体操作是对图进行最多 n − 1 n-1 n−1次松弛操作,每次操作对所有的边进行松弛,可以应用于有向负权图。
- 初始化
伪代码:
m e m s e t ( d i s , ∞ ) , d i s s = 0 , p r e s = 0 memset(dis,\infty), dis_s=0,pre_s=0 memset(dis,∞),diss=0,pres=0
- 算法
void relax (int x, int y, int w) {
if (dis[y] > dis[x] + w) {
dis[y] = dis[x] + w;
}
}
for (int i = 1; i <= n - 1; i ++) {
for (int j = 1; j <= m; j ++) {
relax (edge[j].s, edge[j].e, edge[j].w);
}
}
在
n
−
1
n-1
n−1次操作中,枚举每一条边是否能被松弛(relax操作)即可。
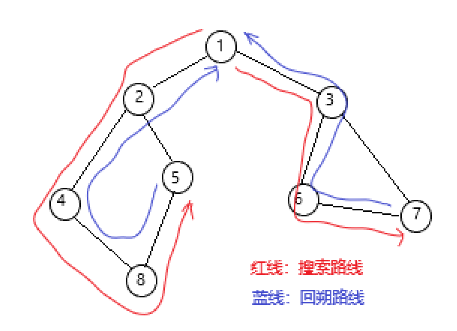
- 判断负环
(1)负环的概念:权值为负数的有向环即为负环。
(2)在Bellman_Ford算法中判断负环:
观察下图:

负环都满足以下性质:
d
i
s
s
+
w
<
d
i
s
e
dis_s+w<dis_e
diss+w<dise
所以,我们再用一重循环,若满足这个性质,一定出现负环。
void relax (int x, int y, int w) {
if (dis[y] > dis[x] + w) {
dis[y] = dis[x] + w;
}
}
bool bellman_ford () {
memset (dis, 0x3f, sizeof dis);
dis[s] = 0;
for (int i = 1; i <= n - 1; i ++) {
for (int j = 1; j <= m; j ++) {
relax (edge[j].s, edge[j].e, edge[j].w);
}
}
for (int i = 1; i <= m; i ++) {
if (dis[edge[i].s] + edge[i].w < dis[edge[i].e]) {
return 0;
}
}
return 1;
}
五、SPFA算法
SPFA算法,即用队列优化的Bellman-Ford算法,本质上还是迭代——每更新一次就考虑入队。
可以应用于有向负权图。
时间复杂度:稀疏图上 Θ ( k N ) \Theta(kN) Θ(kN),稠密图上退化到 Θ ( N 2 ) \Theta(N^2) Θ(N2)
- 算法实现
在Bellman-Ford算法中,有许多松弛是无效的。这给了我们很大的改进的空间。SPFA算法正是对Bellman-Ford算法的改进。它是由西南交通大学段丁凡1994年提出的。它采用了队列和松弛技术。先将源点加入队列。然后从队列中取出一个点(此时该点为源点),对该点的邻接点进行松弛,如果该邻接点松弛成功且不在队列中,则把该点加入队列。如此循环往复,直到队列为空,则求出了最短路径。
void spfa (int s) {
memset (dis, 0x3f, sizeof dis);
memset (vis, 0, sizeof vis);
memset (c, 0, sizeof c);//c数组来判断进入队列的次数
queue <int> q;
dis[s] = 0, vis[s] = 1, c[s] = 1;
q.push(s);
while (q.size()) {
int t = q.front();
q.pop();
vis[t] = 0;
for (int i = head[t]; i; i = next[i]) {
int x = to[i], y = w[i];
if (dis[x] > dis[t] + y) {
dis[x] = dis[t] + y;
c[x] = c[t] + 1;
if (c[x] == n) {
printf ("-1");
exit (0);
}
if (vis[x] != 1) {
q.push(x);
vis[x] = 1;
}
}
}
}
}
Day 14:新知——最小生成树
学习笔记
一、最小生成树
- 生成树:个点用 N − 1 N-1 N−1条边连接成一个连通块,形成的图形只可能是树,叫做生成树。因此,一个有N个点的连通图,边一定 ≥ N − 1 \ge N-1 ≥N−1条。
- 最小生成树(
Minimum Spanning Trees,MST):求无向带权图的一棵子树,包含 N N N个点, N − 1 N-1 N−1条边,边权之和最小。
二、Prim算法
以任意一个点为基准点,节点分为两组:
(1) 在MST上到基准点的路径已经确定的点
(2) 尚未在MST中与基准点相连的点
不断从第
2
2
2组中选择与第
1
1
1组距离最近的点加入第
1
1
1组,类似于Dijkstra算法,本质也是贪心,时间复杂度为
Θ
(
n
2
)
\Theta(n^{2})
Θ(n2)。
- 总体思想:像
Dijkstra一样,也使用“蓝白点”思想,白点代表已进入最小生成树的点,蓝点代表未进入最小生成树的点。以 1 1 1为起点生成最小生成树,d[v]表示蓝点 v v v与白点相连的最小边权,mst表示最小生成树的权值之和。 - 初始化
伪代码:
m e m s e t ( d , ∞ ) , d 1 = 0 , m s t = 0 memset(d,\infty), d_1=0, mst=0 memset(d,∞),d1=0,mst=0
- 算法
f o r ( i : 1 for(i:1 for(i:1~ n − 1 ) n-1) n−1)
(1) 寻找d最小的x,并将其标记。
(2) 累加答案mst += d[x];
(3) 再将与
x
x
x相邻的点更新d[x]的值。
算法结束,mst即为最小生成树的权值之和。
-
Prim算法堆优化(小根堆)
(1) 找出
d
i
s
dis
dis最小的
k
k
k,我们可以用priority_queue优先队列来完成(优化第一个小循环)
(2) 用邻接表或链式前向星拉出与
k
k
k相邻的边的序列(优化第二个小循环)
其实跟Dijkstra算法的优化是一样一样的啦。
void prim () {
for (int i = 1; i <= n; i ++) {
d[i] = inf, vis[i] = 0;
}
d[1] = 0;
q.push(make_pair (0, 1));
while (q.size()) {
int t = q.top().second;
q.pop();
if (vis[t] == 1) {
continue;
}
vis[t] = 1;
for (int i = head[t]; i; i = next[i]) {
int x = to[i], y = w[i];
if (vis[x] == 0 && d[x] > y) {
d[x] = y;
q.push(make_pair (-d[x], x));
}
}
mst += d[t];
}
}
三、Kruskal算法
利用并查集,起初每个点各自构成一个集合,所有边按照边权从小到大排序,依次扫描。
若当前扫描到的边连接两个不同的点集就合并,本质也是贪心,时间复杂度为 Θ ( M log N ) \Theta(M \log N) Θ(MlogN)。
与Prim算法相比,没有基准点,该算法是不断选择两个距离最近的集合进行合并的过程。
- 初始化
用cnt表示已经连的边数。
s o r t ( e d , c m p → sort(ed,cmp→ sort(ed,cmp→按照边权排序 ) ) )
m s t = 0 , c n t = 0 mst=0,cnt=0 mst=0,cnt=0
- 算法
f o r ( i : 1 for(i:1 for(i:1~ m ) m) m)
(1) 如果两个点不在同一个集合,合并,mst += 边权;
(2) 如果cnt连了
n
n
n条边了,跳出算法。
struct node {
long long u, v, w;
bool operator < (const node x) const {
return this->w < x.w;
}
} ed[MAXN];
void MakeSet () {
for (int i = 1; i <= n; i ++) {
father[i] = i;
}
}
int FindSet (int x) {
if (x == father[x]) {
return x;
} else {
return father[x] = FindSet (father[x]);
}
}
bool UnionSet (int x, int y, int i) {
int a = FindSet (x), b = FindSet (y);
if (a == b) {
return 0;
}
father[a] = b;
cnt ++;
mst += ed[i].w;
return 1;
}
void kruskal () {
sort (ed + 1, ed + m + 1);
for (int i = 1; i <= m; i ++) {
if (UnionSet (ed[i].u, ed[i].v, i) == 0) {
continue;
}
if (cnt == n) {
return;
}
}
}
Day 22:新知——倍增&RMQ算法
学习笔记
一、倍增算法概述
倍增,顾名思义就是查找的范围按照翻倍而扩大或缩小,从而达到加速计算的效果。
举一个例子,假设你站在 0 0 0点,你需要跳到 15 15 15个单位长度的地方。
如果每一次都只跳 1 1 1个单位长度,那么需要跳 15 15 15次。
如果按照倍增的思路,那么只需要跳 4 4 4次就可以达到 15 15 15:
设距离终点的长度为 d d d,那么我们每次都可以找到一个数 k k k,使得 2 k ≤ d 2^k \le d 2k≤d且 k k k最大的值,就在这时,我们向前跳 2 k 2^k 2k个单位长度,就是最优的跳跃长度。
-
第一步, d = 15 d=15 d=15, ∵ 2 3 ≤ 15 \because 2^3 \le 15 ∵23≤15, ∴ \therefore ∴ 求得 k = 3 k=3 k=3,跳 8 8 8个单位长度。
-
第二步, d = 7 d=7 d=7, ∵ 2 2 ≤ 7 \because 2^2 \le 7 ∵22≤7, ∴ \therefore ∴ 求得 k = 2 k=2 k=2,跳 4 4 4个单位长度。
-
第三步, d = 3 d=3 d=3, ∵ 2 1 ≤ 3 \because 2^1 \le 3 ∵21≤3, ∴ \therefore ∴ 求得 k = 1 k=1 k=1,跳 2 2 2个单位长度。
-
第四步, d = 1 d=1 d=1, ∵ 2 0 ≤ 1 \because 2^0 \le 1 ∵20≤1, ∴ \therefore ∴ 求得 k = 0 k=0 k=0,跳 1 1 1个单位长度。
这时, d = 0 d=0 d=0,结束跳跃,所以只需要跳 4 4 4步。
二、RMQ算法
RMQ (Range Minimum/Maximum Query),即区间最值算法。
作用:对于 ∀ l , r ∈ { 1 , 2 , . . . , n } \forall l,r \in \{1,2,...,n\} ∀l,r∈{1,2,...,n} 且 l ≤ r l \le r l≤r,都可以以 Θ ( 1 ) \Theta(1) Θ(1)的时间复杂度,求到 max i = l r { a i } \max_{i=l}^r\{a_i\} maxi=lr{ai}。
算法原理:
1. 预处理部分
我们定义一个数组rmq[i][j],类似于定义一个DP数组,表示从第
i
i
i个元素开始往后数
2
j
2^j
2j个元素中的最大值。
首先我们可以很简单的预处理一下: r m q i , i = a i rmq_{i,i}=a_i rmqi,i=ai。
很简单的道理,在一个数里选极值,肯定就是这个数。
接下来用一个dp进行状态转移,状态转移方程为:(此处以求最大值为例)
r
m
q
i
,
j
=
max
{
r
m
q
i
,
j
−
1
,
r
m
q
i
+
2
j
−
1
,
j
−
1
}
rmq_{i,j}=\max\{rmq_{i,j-1},rmq_{i+2^{j-1},j-1}\}
rmqi,j=max{rmqi,j−1,rmqi+2j−1,j−1}
这个状态转移方程也很好理解,就是将整串数对半分,左侧极值和右侧极值更加极端的值就是整串数的极值。
for (int j = 1; (1 << j) <= n; j ++) {
for (int i = 1; i + (1 << j) - 1 <= n; i ++) {
rmq[i][j] = max (rmq[i][j - 1], rmq[i + (1 << j - 1)][j - 1]);
}
}
这样,我们就以 Θ ( n log n ) \Theta(n \log n) Θ(nlogn)的时间复杂度求得了 r m q rmq rmq数组, 1 0 6 10^6 106的数据不在话下。
最后,要求 l l l和 r r r之间的极值 ( l ≤ r ) (l \le r) (l≤r),当然是不能直接输出 r m q l , r rmq_{l,r} rmql,r的。
我们可以求到一个值 k k k,使得从 l l l出发的右 2 k 2^k 2k个数中的极值,和 r r r出发的左 2 k 2^k 2k个数中的极值两个数中极值就是 l l l到 r r r的极值。
所以,我们只要保证 r − 2 k + 1 ≤ l + 2 k − 1 r-2^k+1 \le l+2^k-1 r−2k+1≤l+2k−1成立即可。
r − 2 k + 1 ≤ l + 2 k − 1 r-2^k+1 \le l+2^k-1 r−2k+1≤l+2k−1
移项得: r − l + 2 ≤ 2 k + 1 ⋯ ⋯ ① r-l+2 \leq 2^{k+1} \qquad \cdots \cdots ① r−l+2≤2k+1⋯⋯①
∵ l ≤ r \because l \le r ∵l≤r (前提条件)
∴ 0 ≤ r − l \therefore 0 \le r-l ∴0≤r−l
∴ r − l ≤ 2 ( r − l ) \therefore r-l \le 2(r-l) ∴r−l≤2(r−l)
∴ r − l + 2 ≤ 2 ( r − l + 1 ) ⋯ ⋯ ② \therefore r-l+2 \le 2(r-l+1) \qquad \cdots \cdots ② ∴r−l+2≤2(r−l+1)⋯⋯②
现在观察 ① ① ①、 ② ② ②两式,其左侧相同,右侧一个只带有 k k k,一个只带有 l l l或 r r r,我们就可以认为 2 ( r − l + 1 ) = 2 k + 1 2(r-l+1)=2^{k+1} 2(r−l+1)=2k+1,从而求出 k k k的值。
再次化简,得 k = log 2 ( r − l + 1 ) k=\log_2(r-l+1) k=log2(r−l+1),这就是 k k k的计算公式。
int getrmq (int l, int r) {
int k = log2 (r - l + 1);
return max (rmq[l][k], rmq[r - (1 << k) + 1][k]);
}

RMQ算法就是典型的倍增思想解题。RMQ算法又称**ST算法**,其中rmq数组又称**ST表**。
Day 24:新知——拓扑排序&关键路径
学习笔记
一、拓扑排序的定义
拓扑排序,是一个只适用于 A O V AOV AOV网的算法。 A O V AOV AOV网,即 D A G DAG DAG(有向无环图)。对于一个 D A G DAG DAG进行拓扑排序,是将整个图 G G G的所有顶点排序成一个线性序列,使得图 G G G中的任意一对顶点 u u u和 v v v,若边 < u , v > ∈ E ( G ) <u,v> \in E(G) <u,v>∈E(G),则 u u u在这个序列中出现在 v v v之前。这样的序列称为满足拓扑次序(Topological Order)的序列,注:拓扑排序的序列在一些情况中不唯一,也有可能无解。
二、拓扑排序问题的解决
思想:
- 首先选择一个**入度为 0 0 0**的点。
- 从 A O V AOV AOV网( D A G DAG DAG)中,删除此顶点以及与之相连的边。
- 重复以上步骤,直到不存在入度为 0 0 0的点。
- 如果选择的点数小于总点数,说明图中有环或孤岛;若选择的点数等于总点数,那么顶点选择的次序就是拓扑排序的顺序。
bool dfs (int x) {
int Max = 100;
fl[x] = -1;
for (int i = 0; i < G[x].size(); i ++) {
if (fl[G[x][i]] == -1) {
return 0;
} else if (fl[G[x][i]] == 0 && !dfs (G[x][i])) {
return 0;
} else {
Max = max (Max, topo[G[x][i]] + 1);
}
}
fl[x] = 1;
topo[x] = Max;
return 1;
}
bool toposort () {
for (int i = 1; i <= n; i ++) {
if (!fl[i]) {
if (!dfs (i)) {
return 0;
}
}
}
return 1;
}
注意:代码中fl[i]数组用来记录状态。
- 若 f l i = 0 fl_i=0 fli=0,表示 i i i点没有被访问过;
- 若 f l i = 1 fl_i=1 fli=1,表示 i i i点已经被访问过;
- 若 f l i = 0 fl_i=0 fli=0,表示 i i i点正在访问。
拓扑排序的作用:
三、关键路径
(1) A O V AOV AOV网和 A O E AOE AOE网
A O V AOV AOV网: D A G DAG DAG,有向无环图。
A O E AOE AOE网:带权有向图。
(2) 在关键路径中的术语
- 源点(起始点):入度为 0 0 0的点。
- 汇点(终点):出度为 0 0 0的点。
- 路径长度:整条路径上的权值之和。
- 关键路径:在 A O E AOE AOE网中,从源点到汇点具有最大长度的路径。
Day 25:新知——欧拉回路
学习笔记
一、定义
- 欧拉回路:通过图中每条边,且每条边只通过一次,并且经过每个顶点的回路。
- 欧拉通路:通过图中每条边,且每条边只通过一次,并且经过每个顶点的通路。
- 有向图的基图:忽略所有有向边的方向,得到的无向图就是这个有向图的基图。
解释一下:回路是指从起点出发,经过所有边再回到起点的路径;通路是指从起点出发,经过所有边后到达终点(起点 ≠ \ne =终点)的路径。
具有欧拉回路的图称为欧拉图,具有欧拉通路的图称为半欧拉图。
二、欧拉回路&欧拉通路的性质
(1) 无向图
无向图 G G G为连通图,且 G G G中有且仅有 2 2 2个顶点的度数为奇数,则图 G G G为欧拉通路,其中,两个度数为奇数的顶点必定为起点和终点。
无向图 G G G为连通图,且 G G G中任意顶点的的度数均为偶数,则图 G G G为欧拉回路。
(2) 有向图
有向图 D D D的基图为连通图,且满足 D D D中有且仅有 2 2 2个点的入度不等于出度,而在这两个点中,一个出度比入度多 1 1 1,另一个入度比出度大 1 1 1,则图 D D D为欧拉通路,其中,出度比入度大 1 1 1的点为起点,入度比出度大 1 1 1的点为终点。
有向图 D D D的基图为连通图,且 D D D中任意顶点的出度均等于入度,则图 D D D为欧拉回路。
三、解法
(1) DFS
#include <cstdio>
#include <algorithm>
#include <cstring>
#define inf 0x3f3f3f3f
using namespace std;
const int MAXN = 2000 + 5;
int G[MAXN][MAXN], d[MAXN], ans[MAXN], n, x, y, t;
int Max = -inf, Min = inf;
void dfs (int x) {
for (int i = Min; i <= Max; i ++) {
if (G[x][i]) {
G[x][i] --; G[i][x] --;
dfs (i);
}
}
ans[++ t] = x;
}
int main () {
scanf ("%d", &n);
for (int i = 1; i <= n; i ++) {
scanf ("%d %d", &x, &y);
G[x][y] ++, G[y][x] ++;
Max = max (Max, max (x, y)); Min = min (Min, min (x, y));
d[x] ++, d[y] ++;
}
bool flag = 0;
for (int i = Min; i <= Max; i ++) {
if (d[i] % 2 == 1) {
flag = 1;
dfs (i);
break;
}
}
if (!flag) dfs (Min);
for (int i = t; i >= 1; i --) {
printf ("%d ", ans[i]);
}
return 0;
}
(2) Fleury算法
算法原理:
设图 G G G是一个无向欧拉图。
- 任意在图 G G G中取一顶点 V 0 V_0 V0,令路径 P 0 = V 0 P_0=V_0 P0=V0;
- 假设沿着路径 P i = V 0 E 1 V 1 E 2 V 2 E 3 V 3 . . . E i V i P_i=V_0E_1V_1E_2V_2E_3V_3 ...E_iV_i Pi=V0E1V1E2V2E3V3...EiVi走到点 V i V_i Vi,按照下面方法从 E ( G ) − { E 1 , E 2 , E 3 , . . . , E i } E(G)-\{E_1,E_2,E_3,...,E_i\} E(G)−{E1,E2,E3,...,Ei}中选择一边作为 E i + 1 E_{i+1} Ei+1:
- E i + 1 E_{i+1} Ei+1与 V i V_i Vi相连;
- E i + 1 E_{i+1} Ei+1不应该是 E ( G ) − { E 1 , E 2 , E 3 , . . . , E i } E(G)-\{E_1,E_2,E_3,...,E_i\} E(G)−{E1,E2,E3,...,Ei}中的桥。
- 当(2)不能再进行的这时候,得到的回路 P m = V 0 E 1 V 1 E 2 V 2 E 3 V 3 . . . V m ( V m = V 0 ) P_m=V_0E_1V_1E_2V_2E_3V_3...V_m(V_m=V_0) Pm=V0E1V1E2V2E3V3...Vm(Vm=V0)为 G G G中的一条欧拉回路。
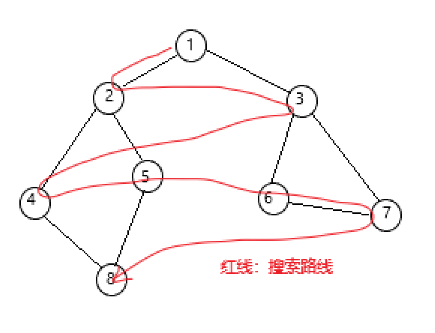
注:无向图 G ( V , E ) G(V,E) G(V,E)为连通图,若边集 E 1 ∈ E E1 \in E E1∈E,再图 G G G中删除 E 1 E1 E1后得到的子图不连通,且删除 E 1 E1 E1的任意真子集后得到的子图为连通图,则称 E 1 E1 E1是 G G G的一个割边集。若一条边构成了一个割边集,则称该边为割边(桥)。
说点人话吧…
如下图,若删除了一条边,整个图会分裂成两个独立的子图,则称这条边为桥。(如红边)

int G[MAXN][MAXN];
stack <int> st;
void dfs (int x) {
st.push(x);
for (int i = 1; i <= n; i ++) {
if (G[x][i] > 0) {
G[x][i] --, G[i][x] --;
dfs (i);
break;
}
}
}
void fleury (int x) {
st.push(x);
while (st.size()) {
bool flag = 0;
int pos = st.top();
for (int i = 1; i <= n; i ++) {
if (G[pos][i] > 0) {
fl = 1;
break;
}
}
if (!flag) {
printf ("%d ", pos);
st.pop();
} else {
st.pop();
dfs (pos);
}
}
}
int main () {
scanf ("%d %d", &n, &m);
for (int i = 1; i <= m; i ++) {
scanf ("%d %d", &x, &y);
G[x][y] ++, G[y][x] ++;
d[x] ++, d[y] ++;
}
int num = 0, start = 1;
for (int i = 1; i <= n; i ++) {
if (d[i] % 2 == 1) {
start = i, num ++;
}
}
if (num == 0 || num == 2) {
fleury (start);
} else {
puts ("No Euler Path");
}
}





