参考文章:
使用Python项目与 V-REP联合仿真 - Play V-REP with Python
CoppeliaSim(原V-REP)新手上路
V-rep机器人仿真(Win10):UR5+RG2+Kinect+YOLOV3+DDPG+Pytorch(第二部分:Vrep与python的联调)
【CoppeliaSim】远程 API 之 Python 控制,对比 V-rep 有些不同
一、在coppeliaSim中搭建仿真环境
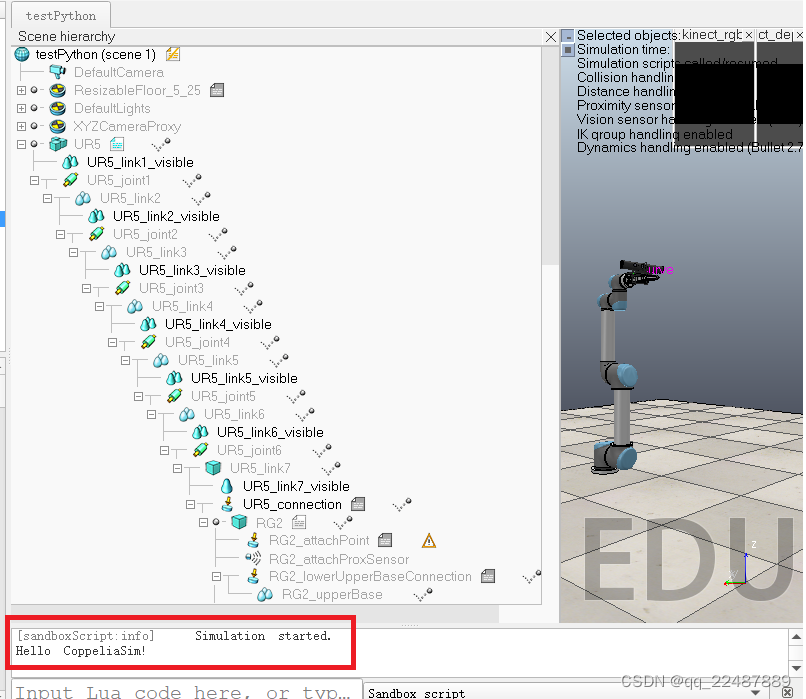
- 这些资料网上很多,在此不做赘述,本人以UR5机械臂为例,软件版本是coppeliaSim 4.1。打开软件,系统会自动新建一个场景,然后将UR5拖拽到你的场景中,这里仅以UR5为例。
UR5机械臂上增加了Graph画图,夹子RG2和深度相机kinect。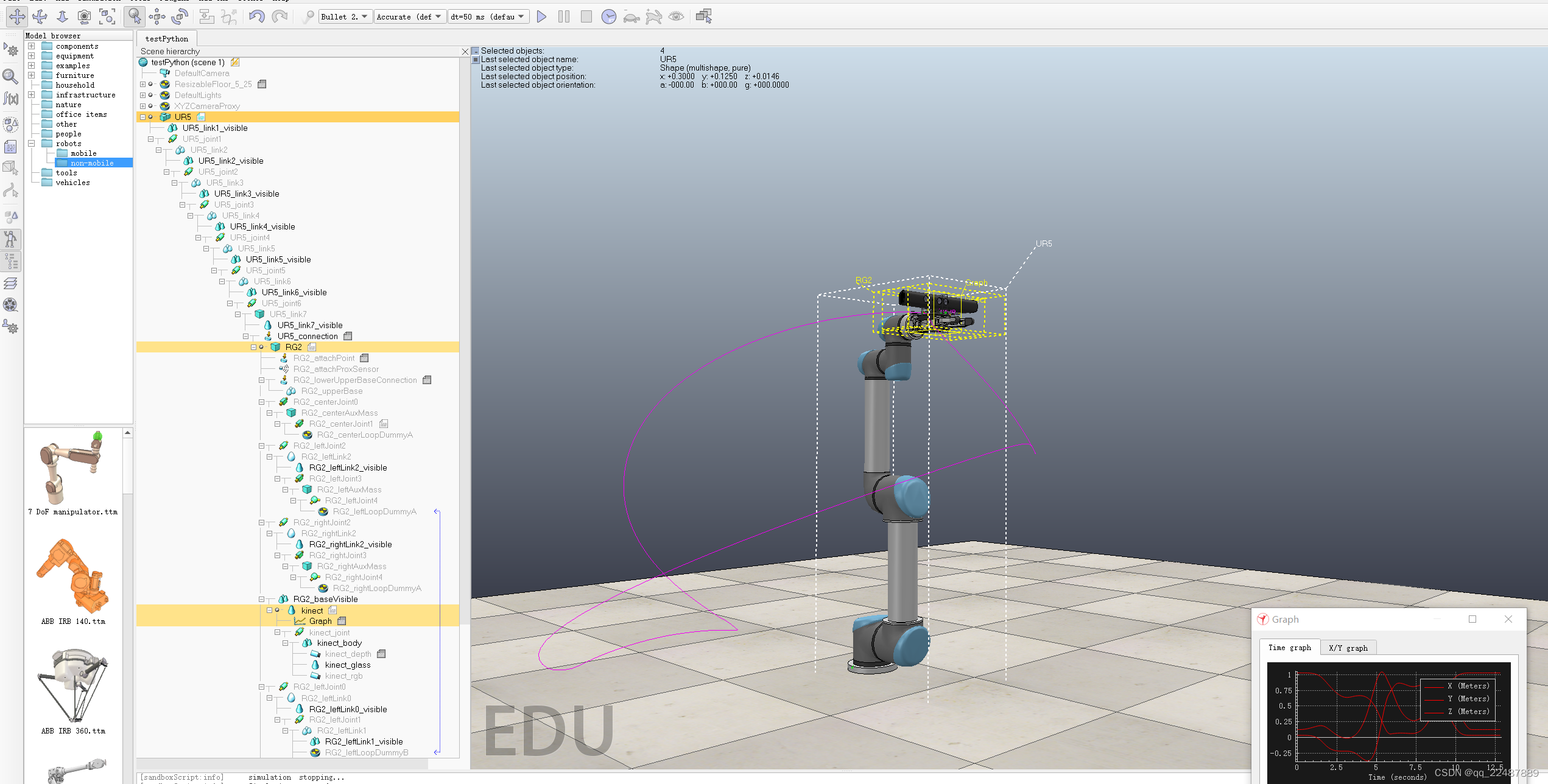
二、coppeliaSim与Python的连接
1. 在UR5右边的脚本程序增加一行代码:
simremoteapi.start(19999)
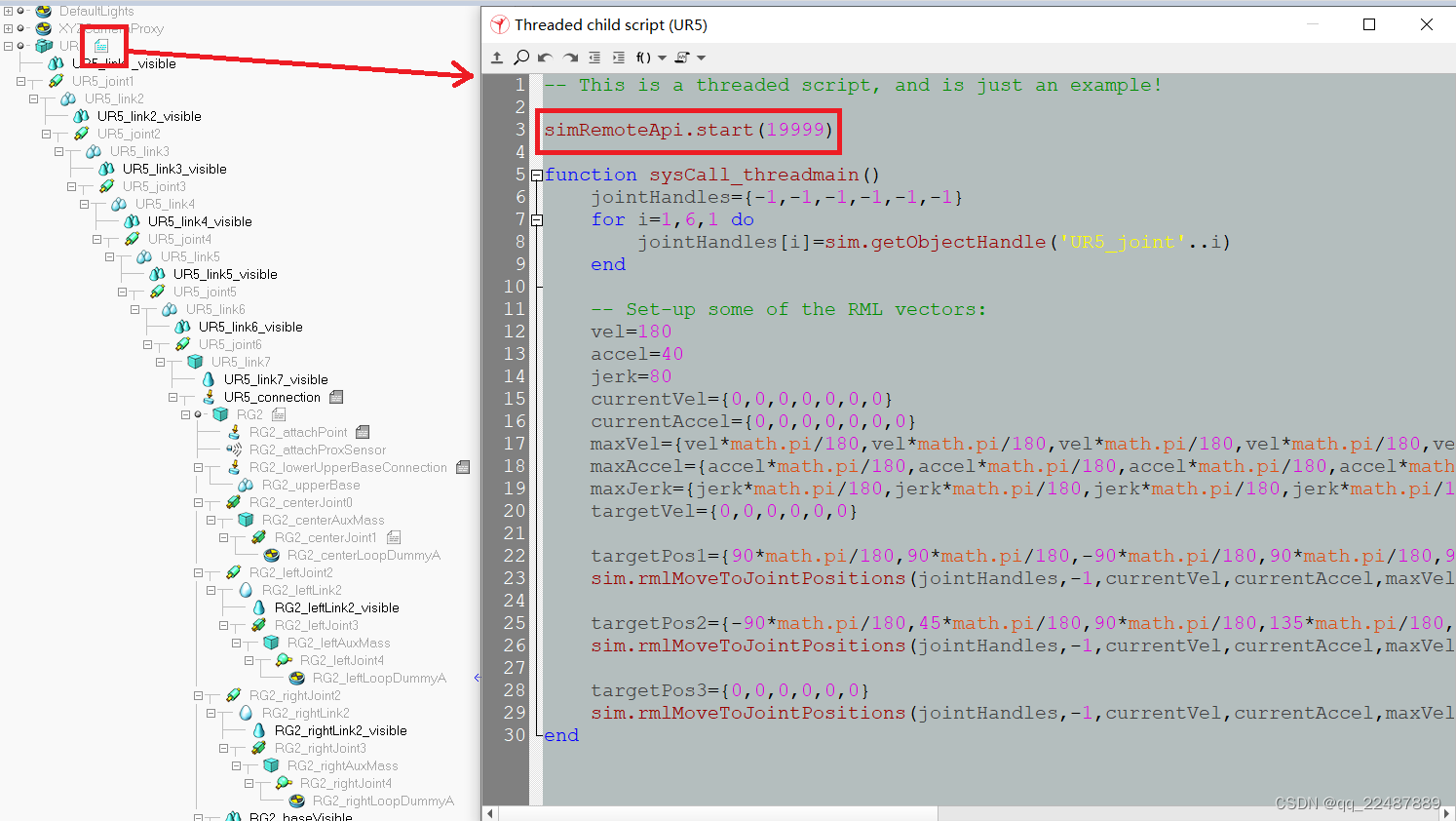
下面的代码是UR5自带的代码,可以删去也可以保留。
对19999的解释:coppeliasim默认开启19999端口,在remoteapiConnections.txt定义,允许自定义
// Let’s start a continuous remote API server service on port 19997:
portIndex1_port = 19997
portIndex1_debug = false
portIndex1_syncSimTrigger = true
2. 创建一个脚本的项目文件夹:
- python或者matlab都可以,此处只学习了python,便只对python进行教学:
可以在文件夹…\coppeliaRobotics\coppeliaSimEdu\programming\remoteapiBindings
看到所支持的语言以及提供的相关语言的示例工程:里面的示例都已经配置好了环境,只需要再coppliaSim中添加需要的通讯代码(例如端口号),就可以直接运行
matlab参考:【CoppeliaSim】远程 API 之 Matlab 控制,对比 V-rep 有些不同
文件夹应当是 一个python的项目文件夹,可以用Visual Studio、PyCharm等进行创建。
- 了解前置知识后,具体的创建项目以及建立连接的步骤如下:
a. 创建一个空文件夹,然后在PyCharm中打开,最后放入三个文件,分别是sim.py、simConst.py和remoteapi.dll
sim.py和simConst.py在:coppeliaSim安装目录\coppeliaRobotics\coppeliaSimEdu\programming\remoteapiBindings\python\python\下
remoteapi.dll在:coppeliaSim安装目录\coppeliaRobotics\coppeliaSimEdu\programming\remoteapiBindings\lib\lib\Windows\下
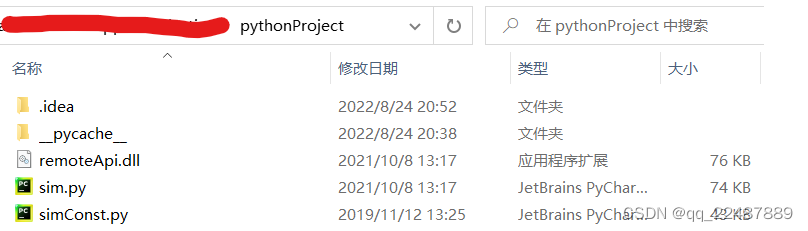
b. 在PyCharm中打开后(自动)配置python运行相关环境,配置以后文件夹如上图
此时环境已经配置完毕了,可以实现python和coppeliaSim的联调。此时我们需要的便是用python程序去连接coppeliaSim并控制机器人。
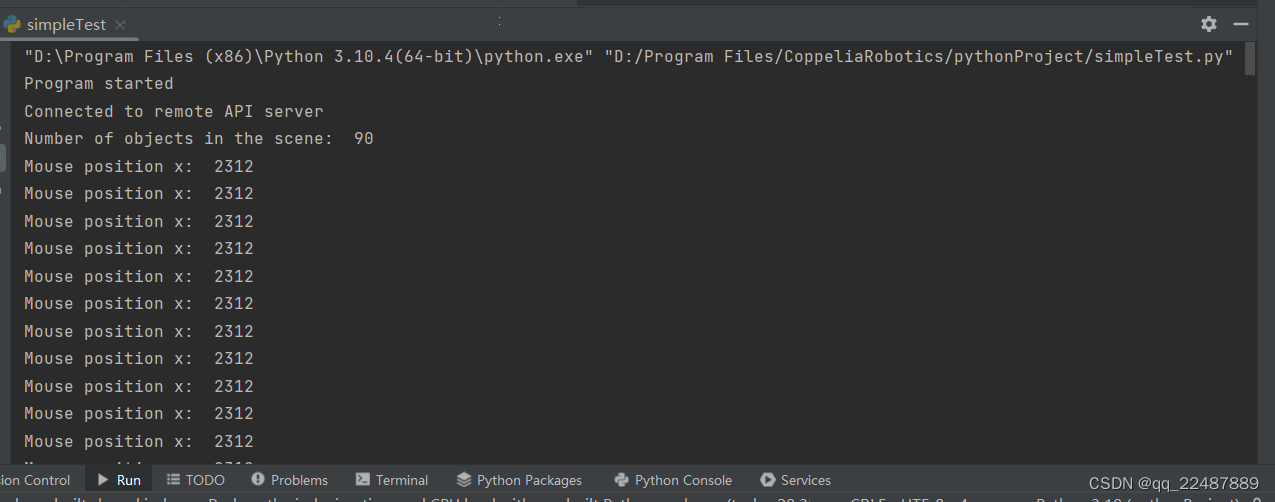
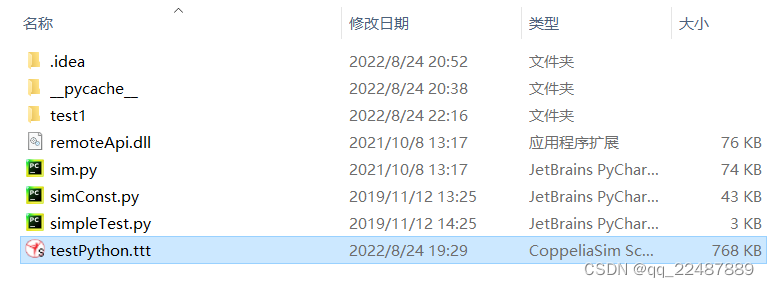
c. 写python脚本进行测试
这里我们直接使用安装文件夹中提供的文件simpleTest.py进行测试
文件位于:
…\coppeliaRobotics\coppeliaSimEdu\programming\remoteapiBindings\python\python\simpleTest.py
代码的讲解见:CoppeliaSim(原V-REP)新手上路
配置完毕后文件夹内容如下: