问题描述
最近,看到一个机械爪抓取蚊香灰的视频,第一感觉是非常interesting,作为技术爱好者,非常迫切的想要了解产品背后的技术原理~,因此,这两天忙里偷闲,对相关资料进行归纳汇总,具体内容如下所示:
机械爪实现蚊香灰抓取,主要的技术难点有:1、柔性夹爪材料力学特性与几何结构之间的耦合;2、气压传感器测量精度;3、电磁阀驱动模块设计,实现气压的精确控制;
01技术详解
柔性机械爪主要由软材料加工制造而成,能够实现物体的无损抓取,在食品加工、医疗以及工业制造等领域具有广泛的应用;其外观结构如下图所示:

调研可知,柔性机械爪的技术理念来源于哈佛大学Whitesides教授(仰望级别的存在),其核心本质属于力学问题,研究软材料在压力作用下的变形规律;具体的结构尺寸参数如下图所示:

上图表述为柔性机械爪的整体示意图,其张开幅度为:0-12mm;在工作范围内,随着输入压力的增大,机械爪张开位移逐渐增加;然而当机械爪张开角度超过一定范围后,由于夹爪的几何外形发生较大改变,使得输入压力与张角之间呈现明显的非线性;附:图片来源于‘柔触机器人’官网;
附录:补充材料
附1、柔性夹爪机械结构以及加工工艺?
针对水果、电路板等大型试件夹取,单个柔性机械爪的张开幅度不能满足需求,因此,工程技术人员进行了优化改进,具体如下图所示:
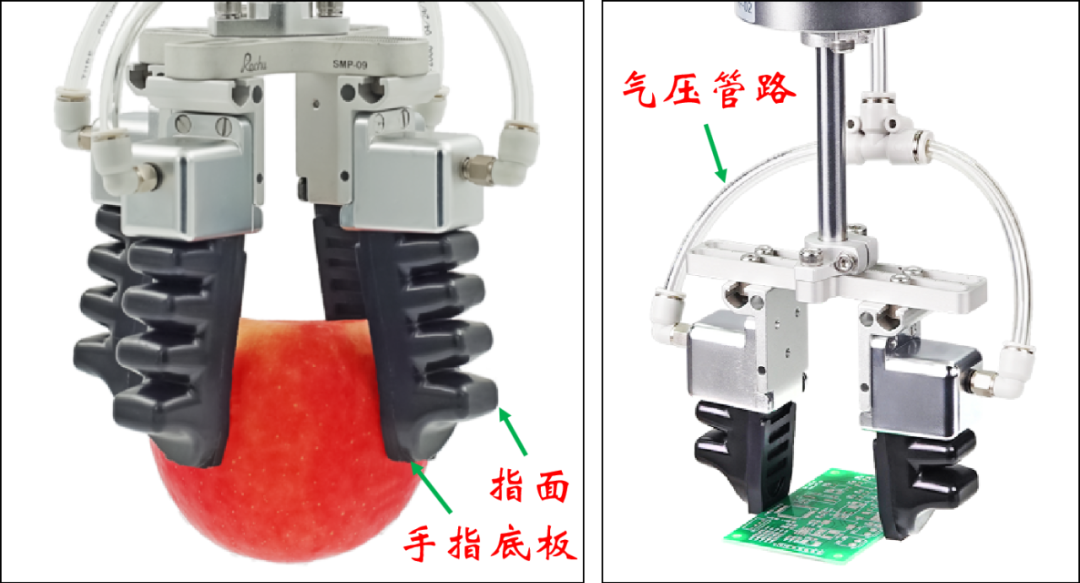
从上图可知,柔性夹爪主要由指面与手指底板两部分组成;当输入压力发生变化时,两者之间的变形差异使得夹爪出现弯曲变形,从而实现物体的夹取;其中,单个夹爪的详细结构如下图所示:

研究资料表明,指面的刚度较低,对外界压力变化较为敏感;因此,输入正压后指面发生的变形量较大,夹爪向内侧弯曲,呈现夹紧状态;相反输入负压时,夹爪整体向外侧弯曲。
过往的研究经验表明,设计环节相对容易,更关键的任务是如何将设计方案具象化,做出原理样机,在逐步迭代优化中将方案进行完善;针对柔性机械爪的加工方案,现对相关的资料进行归纳汇众,具体如下所示:

柔性机械爪主要分为指面和手指底板两部分,分别通过浇筑的方式进行批量化生产,后续通过专门的粘接剂,实现驱动腔的密封;其中,试验中采用液体硅胶(Dragon skin 30)作为基体材料;
柔性机械爪加工完成后,首先需要进行相应的标定实验,针对不同的输入压力,得到夹爪张开幅度与夹持力之间的关系,具体如下图所示;

附2、柔性机械爪控制方案?
柔性机械爪控制系统的主要框架为:通过调节电磁阀开合的程度,使得气压泵输出不同压力幅度的气体,进而控制夹爪的张开位移,实现物品的抓取以及夹持力的控制,具体如下图所示:

上图中红色表示信号线,黑色表示气压管路线;其中,控制板采用stm32f103主控芯片(与信号采集板采用的主控芯片完全一致),通过采集mems压力传感器输出的信号幅值,后续基于相应的算法(PID),给电磁阀和气压泵输出相应的控制信号,进而实现精确的压力控制;
附:对于mems压力传感器,一般情况下满量程的输出信号幅值为50mv;前期自己做的信号采集板,信号检测精度达到5uv以内(0.01%),相当于压力检测环节引起控制板输出的气压偏差为不超过20pa;反馈到夹爪的夹持力,精度偏差达到0.1mg;调研相关资料,该技术指标大于人体皮肤的灵敏度;
附3、柔性夹爪材料及力学特性?
柔性机械爪采用有机硅橡胶加工制备而成;为了提高材料的抗撕裂性能以及断裂伸长率,在有机硅橡胶基体中掺杂有硅油、碳纳米管以及纳米二氧化硅等填充物。实验研究表明:随着硅油含量的增加,材料的硬度逐渐下降,断裂伸长率逐渐增加;另外,随着碳纳米管及二氧化硅填充物含量逐渐增高时,橡胶的硬度增加,断裂伸长率减小;
附4、柔性夹爪的应用场景及优缺点?
机械爪主要包含:刚性机械手爪、真空吸盘以及柔性机械爪等;其中,刚性机械手爪在使用过程中,难以控制夹持力度,很难对柔软、脆弱物体实现无损抓取。另外,真空吸盘在搬运过程中难以适应表面粗糙、开孔的异形物体。柔性机械爪能够克服两者的弊端,实现物品的无损抓取,大大提高了人机相容性;
然而,柔性夹爪也有相应的弊端,主要体现在:1、控制繁琐:需要正压和负压切换(正压控制打开,负压控制夹紧);2、夹持力较弱,不适合重型工件的夹持;3、夹紧自定位能力差,机械臂运行速度过快时候,自变形严重;
附1、个人认为:系统实现的难点不在于夹爪结构设计以及材料选择,不在于气泵的精度;其核心技术为:在种种客观条件的制约下,将单个技术集成到一起,做出满足实际需求的产品,实现技术、资源的整合;尽管产品不是最完美的,但是能够在社会中找准自己的定位,真正的带来价值;
附2、参考文献:刚柔复合软指的设计与性能分析[D];一种柔性材料[P];气路分配组件及使用该组件的正负压调节集成模块[P];一种新型柔性手指[P];