写在前面:
最近机器人导航做移动目标点选择的时候,经常会选到障碍点上,导致指令发出之后机器人规划不出到达的路径从而在原地转圈。解决思路是把CostMap读出来,之后可以参考CostMap选择一个最近的无障碍点。
所以本篇的主要内容是python写一个Subscriber实现CostMap的订阅以及用opencv去把它画出来。
1. 关于ROS中的Topic和CostMap
ROS中有多种通信的机制,我们这里用到的是Topic机制。我们可以通过rostopic list去查阅机器人当前正在进行的所有话题;通过rostopic list -v可以显示所有正在进行的话题的发布者和订阅者的详细信息。以locobot机器人的部分Topic为例:
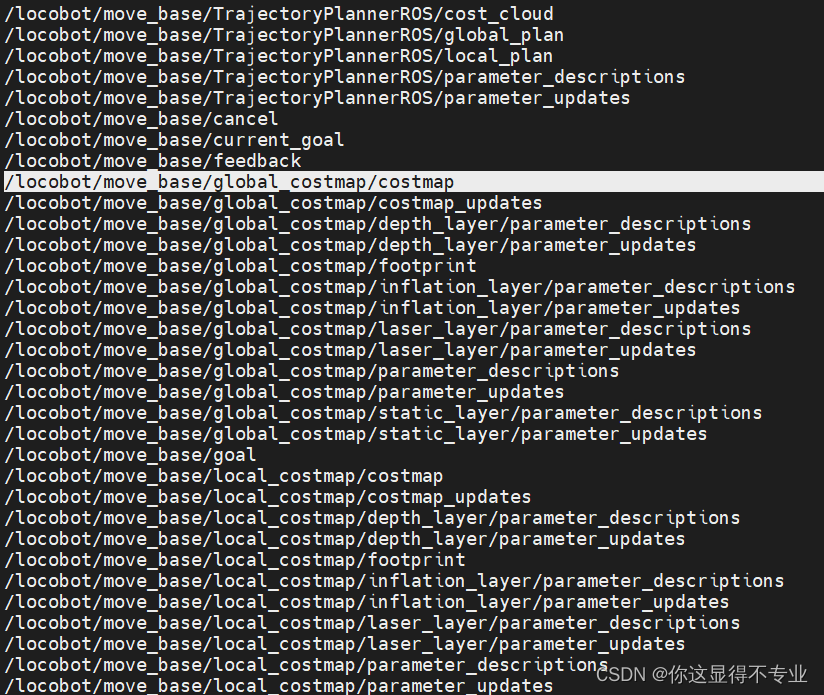
CostMap代价地图分Local和Global两张,分别用于局部路径规划和全局路径规划。我们这里以订阅GlobalCostMap为例,在通过
rostopic list找到该话题后,可以通过rostopic info /locobot/move_base/global_costmap/costmap查阅到其数据类型。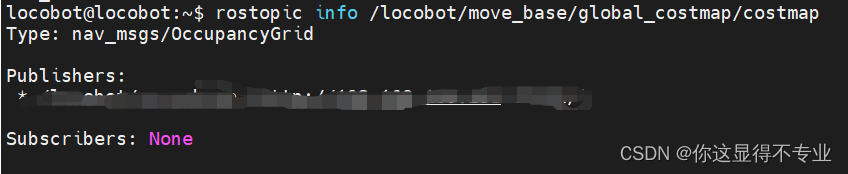
可以看到CostMap是一个nav_msgs/OccupancyGrid的类型,之后我们需要这样去import这个类。
from nav_msgs.msg import OccupancyGrid
我们同样可以通过rosmsg show OccupancyGrid去查看其具体结构。每个字段更为详细的解释可以参考这篇博客:https://blog.csdn.net/tiancailx/article/details/112133226
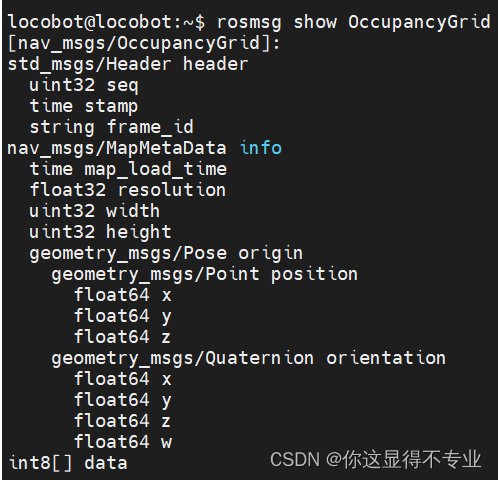
int8[] data中包含的就是这个CostMap(原本应该是一个二维的栅格地图),在data中被拉伸成了一个一维数组存储。需要注意的是,每一个网格的值不再是我们熟知的RGB图像中的0-255,而是-1和0-100。-1代表未知,0代表无障碍,这个在我们之后用Opencv画CostMap的时候会作为颜色选择的判断条件。
2. 如何写一个Subscriber
关于如何写一个订阅器去接收到CostMap, 可以参考这一篇文章。https://blog.csdn.net/Mr_Poohhhh/article/details/103797043
大概就是:
class MySubscriber:
def __init__(self):
# 定义一个接收器
self.__sub_ = rospy.Subscriber('topic to be subscribed', Sub msg type, self.callback)
self.data = None
# callback接收msg
def callback(self, msg):
assert isinstance(msg, Sub msg Type)
# 接收读取msg等之后一系列操作
data = msg
3. 完整代码
#!/usr/bin/env python
import rospy
import numpy as np
import copy
import cv2
from nav_msgs.msg import OccupancyGrid
import message_filters
class CostMap(object):
"""
This is a class to get the Global Cost Map.
"""
def __init__(self):
"""
Constructor for Global Cost map class.
:param configs: configurations for costmap
:type configs: OccupancyGrid
"""
self.occupancygrid_msg = None
self.map_data = None
self.width = None
self.height = None
# 刚刚通过rostopic list查阅出来的话题名
costmap_topic = '/locobot/move_base/global_costmap/costmap'
# 编写一个subscriber 参数分别为:
# topic名
# 消息类型
# 绑定自己重命名的callback function
self.costmap = rospy.Subscriber(costmap_topic, OccupancyGrid, self.get_cost_map)
def get_cost_map(self, msg):
"""
costmap subscriber's callback function.
"""
self.occupancygrid_msg = msg
self.map_data = msg.data
self.width = msg.info.width
self.height = msg.info.height
def get_map(self):
"""
This function returns the size and 2D costmap.
:rtype: [int, int], np.ndarray
"""
while(not self.occupancygrid_msg):
continue
width = copy.deepcopy(self.width)
height = copy.deepcopy(self.height)
size = [width, height]
costmap = copy.deepcopy(self.map_data)
return size, costmap
def draw_map(map_size, map_dat):
"""
This function returns the RGB image perceived by the camera.
:rtype: np.ndarray or None
"""
row, col = map_size[1], map_size[0] # 一维转二维,注意对应关系
costmap = np.array(map_data)
costmap = costmap.reshape((row, col))
img = np.zeros((row, col, 3))
for i in range(row):
for j in range(col):
# 判断无障碍点、未知点和障碍点 画不同颜色
if costmap[i][j] == 0:
img[i][j] = [255, 255, 255]
elif costmap[i][j] == -1:
img[i][j] = [255, 0, 0]
else:
img[i][j] = [0, 0, 0]
cv2.imshow('map',img)
cv2.waitKey(0)
def main():
print('Start')
costmap = CostMap()
print('Load...')
map_size, map_data = costmap.get_map()
draw_map(map_size, map_data)
print('Finished!')
if __name__ == "__main__":
main()
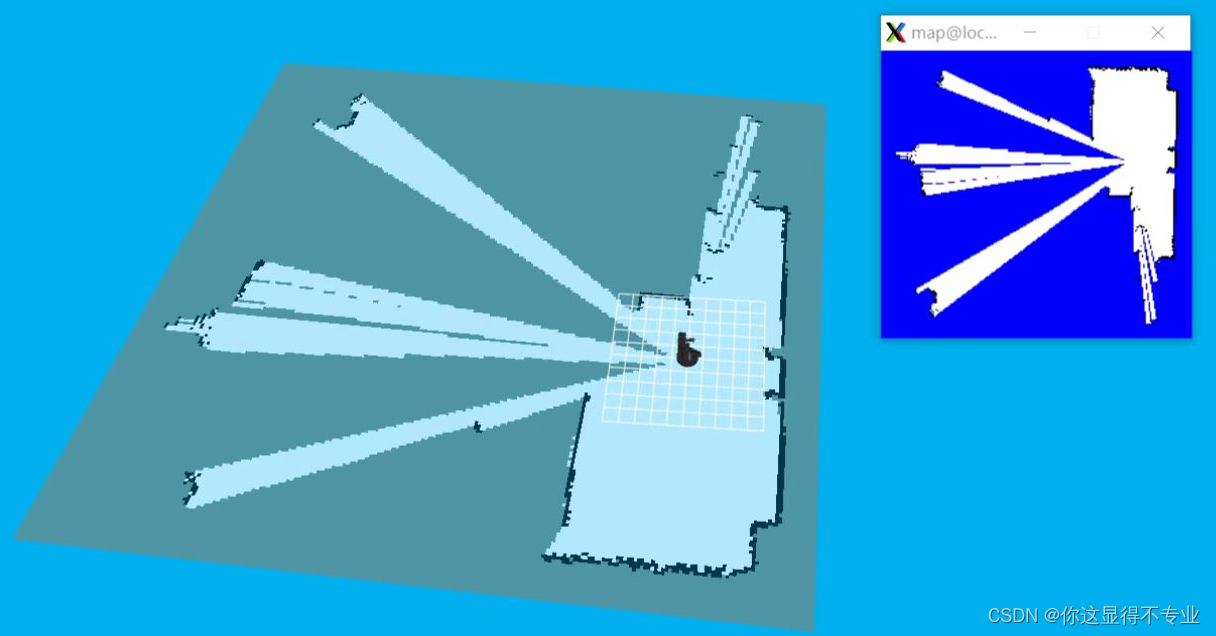
4. 可视化效果
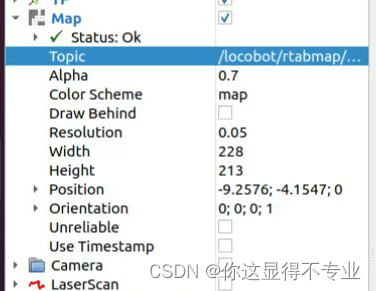
打开Rviz,可以看到右上角我们用Opencv画出来的GlobalCostMap和Rviz中的是一样的。
最后想说,其实Rviz中很多可视化也都是基于Topic去做订阅,我们想要获取信息的时候,其实Rviz里都显示了Topic的名字和消息中都包含什么数据类型。包括之后也可以尝试自己去写Publisher然后在Rviz中去订阅和可视化展现。今天就先到这里…