1.6、OLED使用说明
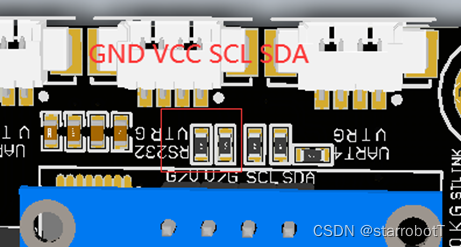
板子上设计的OLED接口,有两种接口方式
- GND VCC SCL SDA(由左至右)
- VCC GND SCL SDA(由左至右)
默认的接线方式是第一种,如果想使用第二种接线方式则需要把电源选择电阻换(焊接)到底层,具体说明如下图。
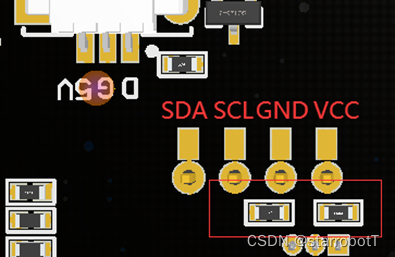
如果客户需要在淘宝购买OLED模块请先确认好接线方式再去购买,如果已经有OLED模块的用户,默认的接线方式不对则需要修改电源选择电阻的位置(可以在下单的时候说明),或者自己手动替换(焊接),在使用OLED时一定要先确认接线方式正确,再上电,不要带电操作,否则因个人操作不当产生的损失,由个人承担。
1.7、USB虚拟串口使用说明
开发板设计了USB虚拟串口的接口,用于连接Win(starrobotTools)上位机或者与ros通信。

1.8 大功率电机扩展版使用说明
控制器自带的驱动板目前最大输出是2A,可能无法满足部分用户的需求,因此设计了大功率电机驱动板,大功率电机驱动板主要通过四组线和控制器进行通信(使用四个电机是四组,使用两个电机是两组),使用大功率电机只需要在上层修改对应的驱动名称即可,参考第7章。
1.9 超声波接口使用说明
驱动板设计了两路超声波模块接口,电源输出是5V。使用超声波模块,只需要在上层使能对应的标志位即可,具体参考第7章。
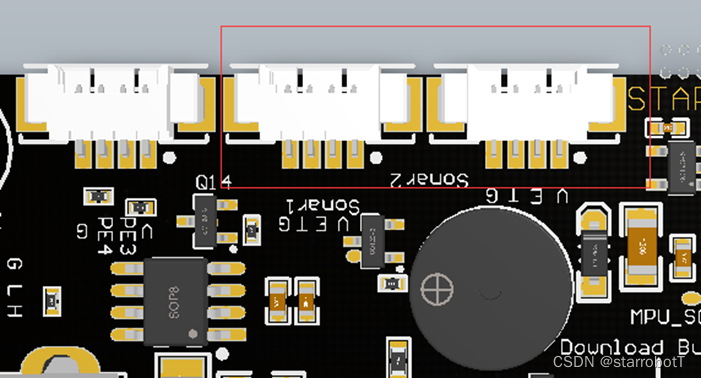
板子 超声波模块
G --> 超声波GND(不可接错)
T --> TRIG(不可接错)
E --> ECHO(不可接错)
V --> 超声波5V(不可接错)
1.10 PWM输出口使用说明
驱动板设计了4路PWM输出口,可以用来驱动舵机,直流有刷电调,直流无刷电调。具体怎么使用需要根据个人需求而定,相关的配置参数参考第7章即可。
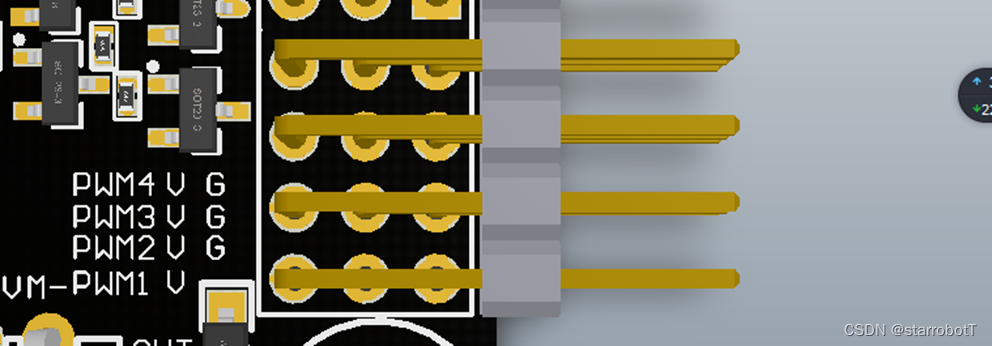
板子 舵机电调
PWMx ---> 信号线(一般是黄线或者白线)
V ---> 电源正极(一般是红线,5V)
G ---> 电源负极(一般是黑线)
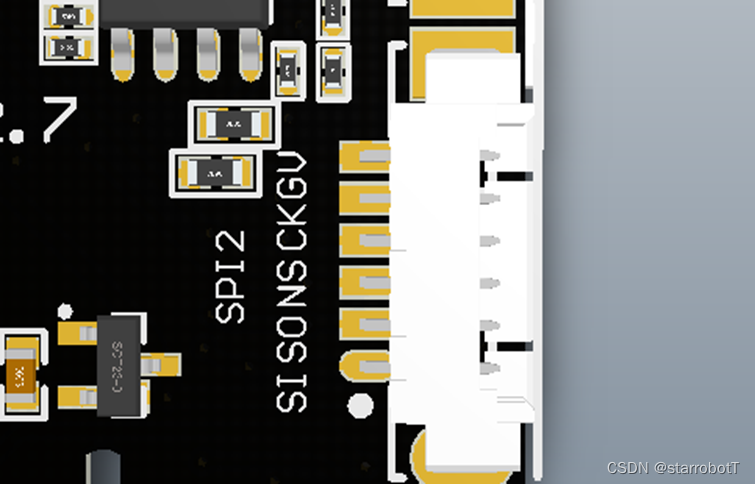
1.13 SPI接口使用说明
控制板设计了一路SPI接口,但是目前是没有使用到。
1.14 其他USART输出接口使用说明
控制器设计了3路扩展的USART接口(USART 2、USART 3、USART 4),目前这三路串口写好了驱动代码,但是没有实际的应用场景,其中串口3和SBUS接口是共用的,USART3和SBUS功能不同时使用。
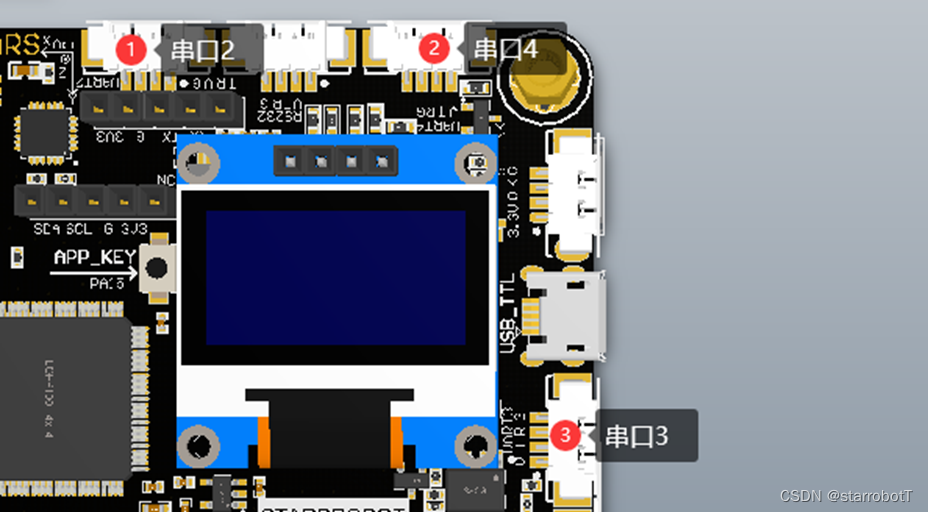
板子 其他串口接头
V ---> 电源正极(5V)
T ---> RX(一般都是需要交叉接,不需要交叉的则是TX)
R ---> TX(一般都是需要交叉接,不需要交叉的则是RX)
G ---> 电源负极
1.15 RS232接口使用说明
控制器设计了一路RS232接口,目前还没有实际的应用场景。
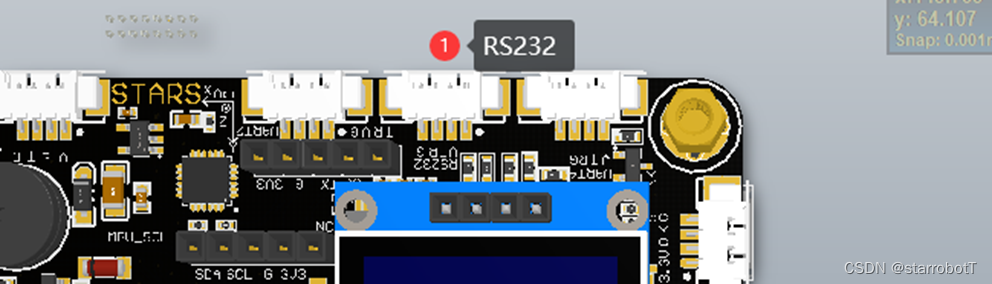
板子 其他RS232接头
V ---> 电源正极(5V)
T ---> RX(一般都是需要交叉接,不需要交叉的则是TX)
R ---> TX(一般都是需要交叉接,不需要交叉的则是RX)
G ---> 电源负极
1.16 CAN接口使用说明
控制器设计了一路CAN接口,驱动代码已经写好,但是目前还没有实际的应用场景。

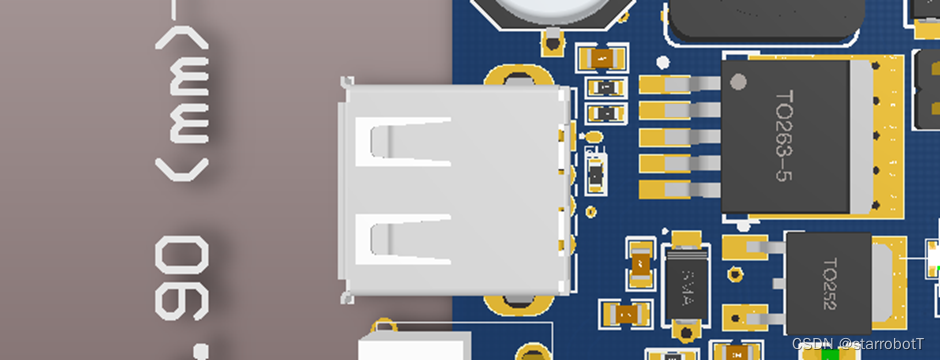
1.17 5V4A直流输出接口
驱动板上设计了一路5V4A直流输出接口,主要用于给树莓派、英伟达Nano供电。
1.18 板载电机驱动输出使用说明
控制器设计了4个电机驱动输出口,主要用于驱动常用的直流减速电机,使用A4950电机驱动芯片,最大电流2A,最高电压25V。
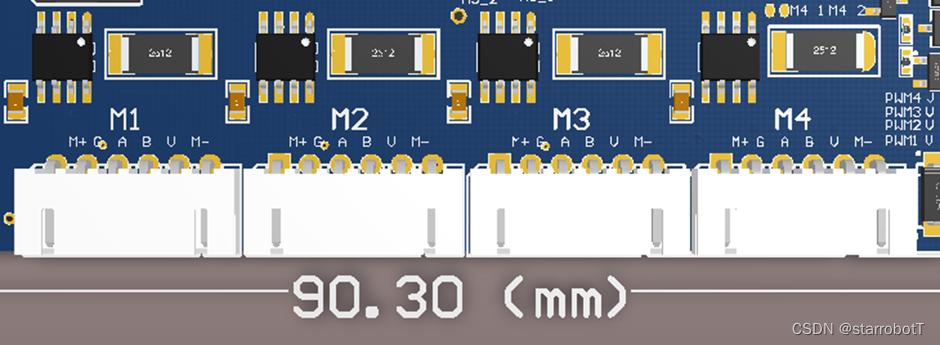
在接线的时候需要注意线序是否正确,对应的接线如下图:

板子 电机
M+ --> M+/M-(这个正负没有关系)
G --> 编码器GND(不可接错)
A --> 编码器A相/编码器B相
B --> 编码器B相/编码器A相
V --> 编码器5V(不可接错)
M- ---> M-/M+(这个正负没有关系)
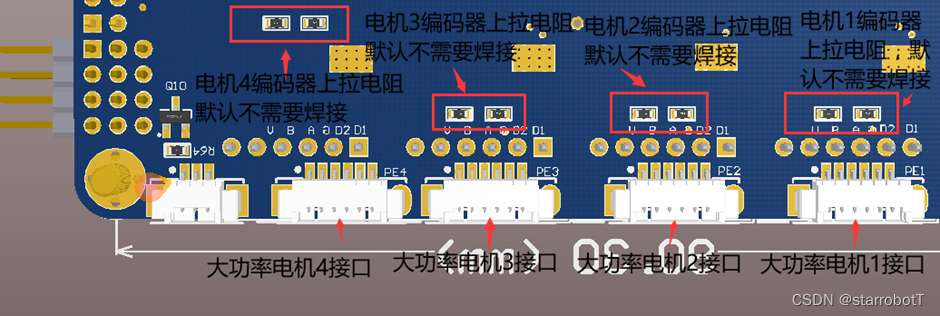
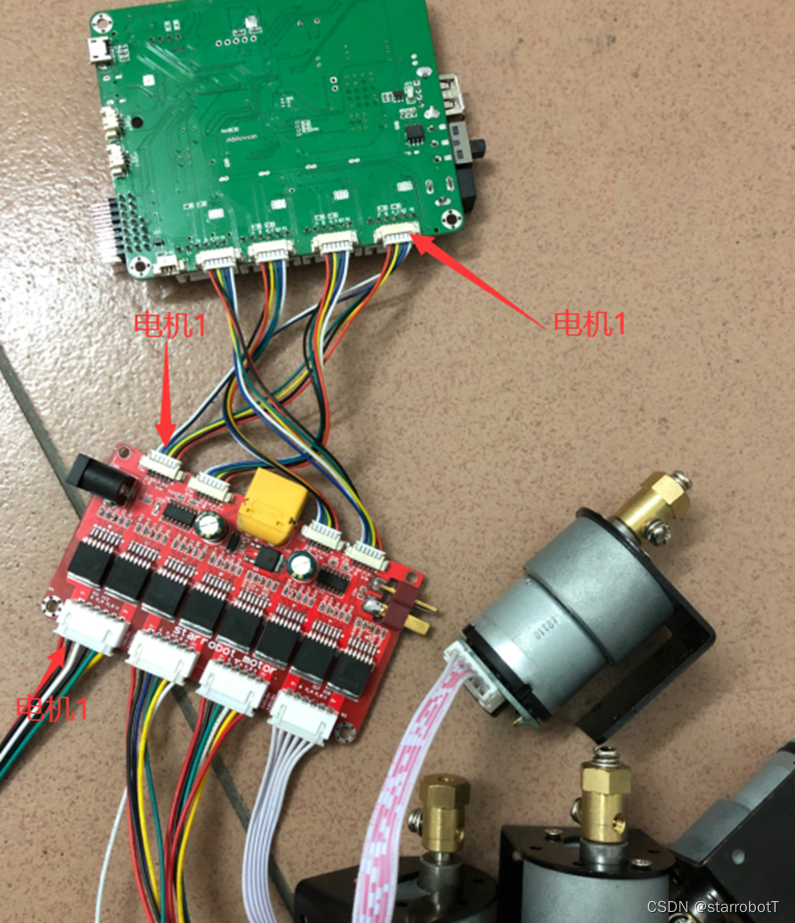
1.19 大功率电机驱动使用说明
大功率电机接线如下图,大功率电机驱动板和控制器的接线,只需要把我给的连接线接上即可,不需要调整线序,大功率电机驱动板和电机的接线还是需要注意线序的(参考1.18节)。
1.20 外接IMU使用说明
控制器本身是带有IMU姿态传感器的,使用的是MPU6050芯片。IMU外接口主要是让用户可以选择使用不同的IMU姿态传感器进行学习。固件的代码中已经写好了GY85、MPU6050、MPU9250、MPU6500等传感器的程序,用户只需要在上层中修改使用的IMU设备参数即可,具体参考第7章节。
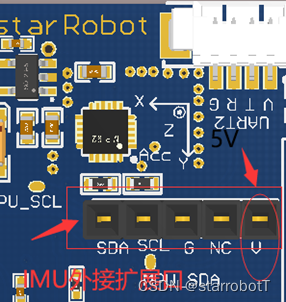
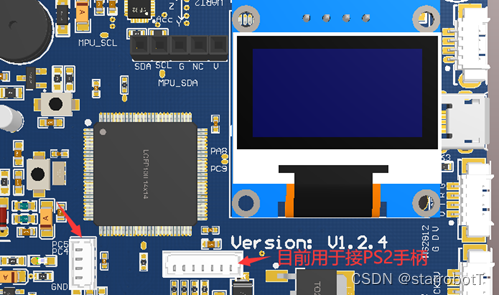
1.21 控制器其他扩展IO口使用说明
控制器上海预留了9个扩展的IO口。可以给用户自由发挥,其中有一组目前用于接PS2手柄。
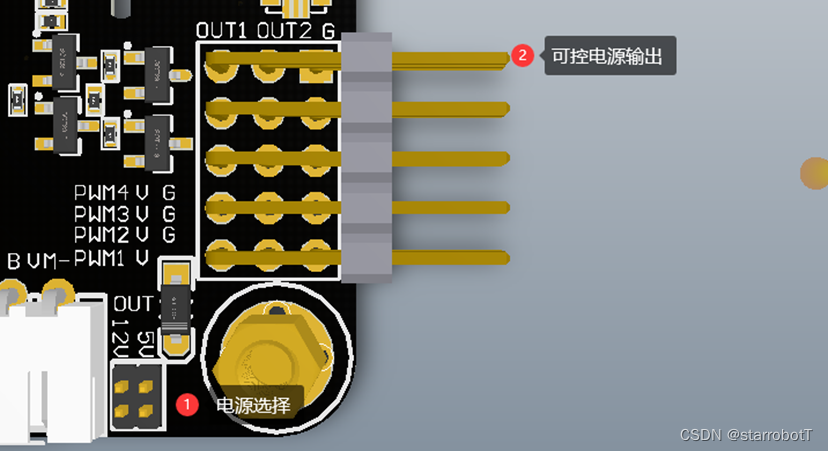
1.22 可控电源输出接口使用说明
板子设计了2路可控电源输出接口,输出的电压是控制器的输入电压。可以通过代码控制电源的输出与关断。
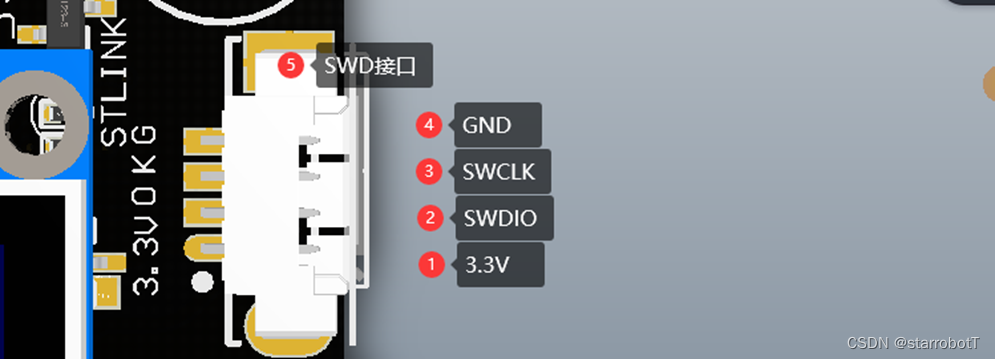
1.23 STLINK使用说明
STLINK与开发板的接线如下,电源要求3.3V不可接入5V
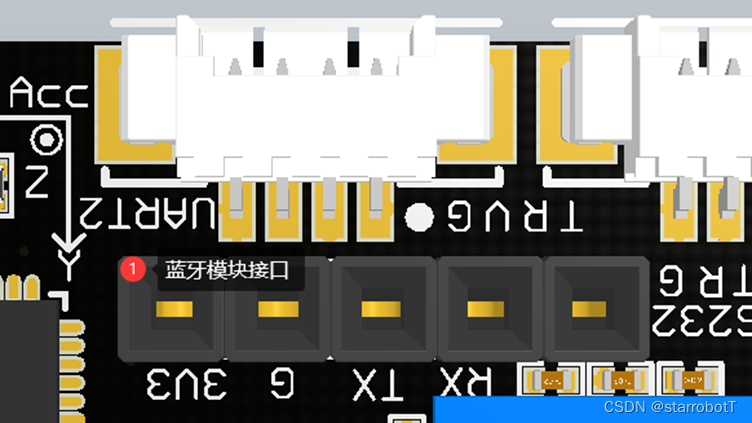
1.24 BLE蓝牙模块使用说明
控制器预留BLE蓝牙模块接口(2.54-5P母排)端口定义见丝印,连接MCU的UART2
1.25 PS2手柄使用说明
开发板设计有PS2手柄接口,可以配合店铺里的PS2转接板或者自己接线都行,如下图:


只有设置电机线序和编码器线序后才能正常运行,否则可能会出现转动无法停止的情况,因为使用了PID调整,编码器线序不对会使反馈值不正确,从而一直转动无法停止
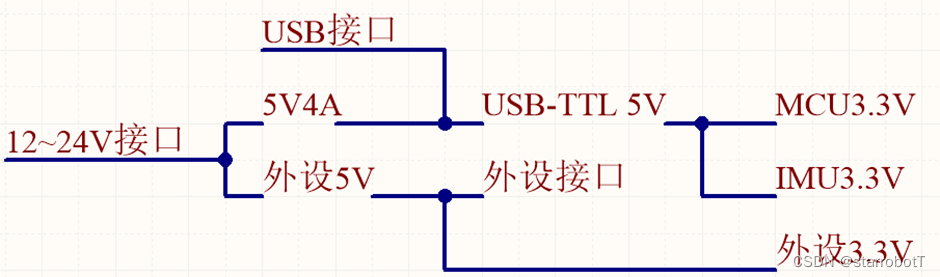
1.26 板子电源部分
开发板设计了3路独立的5V电源分别为USB-TTL 5V、5V4A、外设5V。
3路3.3V电源分别为MCU3.3V、IMU3.3V、外设3.3V。
5V4A是12~24V通过专用的DC芯片TPS54531DDAR得到,没有做防串压保护,12~24V输入端必须给输入才会有输出。
USB-TTL 5V通过二极管和保险丝,保护输入端,防止灌流。5V4A通过二极管输出给USB-TTL 5V,防止在使用USB数据线供电时会串压到12~24V。
外设5V是12V通过DC芯片78M05降压得到,因此需要给外部设备供电时,12~24V必须给输入,78M05的输入端也接了二极管,防止串压。
MCU3.3V是USB-TTL 5V通过LDO降压芯片得到,给STM32进行供电。
IMU3.3V是USB-TTL 5V通过LDO降压芯片得到,给IMU供电。
外设3.3V是外设5V通过LDO降压芯片得到。
电源的拓扑图如下: