问题描述

但是代码没有按预期进行轮换。 我在下面附上代码。
import math
import numpy as np
import cv2
im = cv2.imread("Samples\\baboon.jpg",cv2.IMREAD_GRAYSCALE)
new = np.zeros(im.shape,np.uint8)
new_x = im.shape[0] // 2
new_y = im.shape[1] // 2
x = int(input("Enter the angle : "))
trans_mat = np.array([[math.cos(x),math.sin(x),0],[-math.sin(x),math.cos(x),[0,1]])
for i in range(-new_x,im.shape[0] - new_x):
for j in range(-new_y,im.shape[1] - new_y):
vec = np.matmul([i,j,1],trans_mat)
if round(vec[0] + new_x) < 512 and round(vec[1] + new_y) < 512:
new[round(vec[0]+new_x),round(vec[1]+new_y)] = im[i+new_x,j+new_y]
cv2.imshow("rot",new)
cv2.imshow("1",im)
cv2.waitKey(0)
cv2.destroyAllWindows()
解决方法
您似乎正在尝试实现最近邻居重采样器。您正在做的是浏览图像并将每个输入像素映射到输出图像中的新位置。这会导致诸如像素相互错误覆盖,输出像素为空等类似问题。
我建议(根据经验)您正在反向看问题。与其查看输入像素在输出中的终止位置,不如考虑每个输出像素在输入中的起始位置。这样,您就不会对最近的邻居产生歧义,并且整个图像阵列都将被填充。
您要绕中心旋转。您正在使用的当前旋转矩阵绕(0,0)旋转。为了弥补这一点,您需要将图像的中心平移到(0,0),旋转,然后平移回去。我不会向您展示完整的仿射矩阵,而是向您展示如何手动执行各个操作,然后将它们组合到变换矩阵中。
手动计算
首先获取输入和输出图像:
im = cv2.imread("Samples\\baboon.jpg",cv2.IMREAD_GRAYSCALE)
new = np.zeros_like(im)
然后确定旋转中心。要清楚您的尺寸x通常是列(dim 1而不是行(dim 0):
center_row = im.shape[0] // 2
center_col = im.shape[1] // 2
计算图像中每个像素的径向坐标,并调整为相应的尺寸:
row_coord = np.arange(im.shape[0])[:,None] - center_row
col_coord = np.arange(im.shape[1]) - center_col
row_coord和col_coord是输出图像中距中心的距离。现在,在 input 中计算它们来自的位置。请注意,我们可以使用广播来避免循环。我在这里遵循原始的角度定义约定,并找到反向旋转来确定源位置。这里最大的区别是,以度为单位的输入将转换为弧度,因为这是三角函数所期望的:
angle = float(input('Enter Angle in Degrees: ')) * np.pi / 180.0
source_row = row_coord * np.cos(angle) - col_coord * np.sin(angle) + center_row
source_col = row_coord * np.sin(angle) + col_coord * np.cos(angle) + center_col
如果确保所有索引都落在输入图像之内,则您甚至不需要预先分配输出。您实际上可以只做new = im[source_row,source_col]。但是,您需要屏蔽索引:
mask = source_row >= 0 & source_row < im.shape[0] & source_col >= 0 & source_col < im.shape[1]
new[mask] = im[source_row[mask].round().astype(int),source_col[mask].round().astype(int)]
仿射变换
现在让我们看一下使用仿射变换。首先,您要从坐标中减去中心。假设您有一个列向量[[r],[c],[1]]。转换为零将是矩阵
[[r'] [[1 0 -rc] [[r]
[c'] = [0 1 -cc] . [c]
[1 ]] [0 0 1 ]] [1]]
然后(向后)旋转:
[[r''] [[cos(a) -sin(a) 0] [[r']
[c''] = [sin(a) cos(a) 0] . [c']
[ 1 ]] [ 0 0 1]] [1 ]]
最后,您需要翻译回中心:
[[r'''] [[1 0 rc] [[r'']
[c'''] = [0 1 cc] . [c'']
[ 1 ]] [0 0 1]] [ 1 ]]
如果将这三个矩阵从右到左依次相乘,则会得到
[[cos(a) -sin(a) cc * sin(a) - rc * cos(a) + rc]
M = [sin(a) cos(a) -cc * cos(a) - rc * sin(a) + cc]
[ 0 0 1 ]]
如果您构建输出坐标的完整矩阵而不是我们开始使用的子集数组,则可以使用np.matmul(也称为@运算符)来为您进行乘法。对于这样一个简单的情况,并不需要如此复杂的级别:
matrix = np.array([[np.cos(angle),-np.sin(angle),col_center * np.sin(angle) - row_center * np.cos(angle) + row_center],[np.sin(angle),np.cos(angle),-col_center * np.cos(angle) - row_center * np.sin(angle) + col_center],[0,1]])
coord = np.ones((*im.shape,3,1))
coord[...,:] = np.arange(im.shape[0]).reshape(-1,1,1)
coord[...,:] = np.arange(im.shape[1]).reshape(-1,1)
source = (matrix @ coord)[...,:2,0]
其余处理与手动计算非常相似:
mask = (source >= 0 & source_row < im.shape).all(axis=-1)
new[mask] = im[source[0,mask].round().astype(int),source_col[1,mask].round().astype(int)]
我认为这就是您要寻找的 Properly rotate image in OpenCV?
这是代码
ang = int(input("Enter the angle : "))
im = cv2.imread("Samples\\baboon.jpg",cv2.IMREAD_GRAYSCALE)
def rotimage(image):
row,col = image.shape[0:2]
center=tuple(np.array([col,row])/2)
rot_mat = cv2.getRotationMatrix2D(center,ang,1.0)
new_image = cv2.warpAffine(image,rot_mat,(col,row))
return new_image
new_image = rotimage(im)
cv2.imshow("1",new_image)
cv2.waitKey(0)
我尝试实现 Madphysicist 的矩阵乘法方法。这是实施,对于那些关心的人:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import numpy as np
import matplotlib.pyplot as plt
from pathlib import Path
path = Path(".")
img = plt.imread(path.resolve().parent / "img_align" / "faces_imgs" / "4.jpg")
angle = 15
def _transform(rot_mat,x,y):
"""
conveninece method for matrix multiplication
"""
return np.matmul(rot_mat,np.array([x,y,1]))
def rotate(img,angle):
angle %= 360
angle = np.radians(angle)
new = np.zeros_like(img)
cx,cy = tuple(x / 2 for x in img.shape[:2])
# Angles are reverse as we are interpolating from destination to source
rot_mat = np.array(
[
[np.cos(-angle),-np.sin(-angle),0],[np.sin(-angle),np.cos(-angle),1],]
)
rot_mat[0,2],rot_mat[1,_ = _transform(rot_mat,-cx,-cy)
# build combined affine transformation matrrix
rot_mat[0,2] += cx
rot_mat[1,2] += cy
coord = np.ones((*img.shape,1)) # [576x336x3x3x1]
coord[...,:] = np.arange(img.shape[0]).reshape(-1,1)
coord[...,:] = np.arange(img.shape[1]).reshape(-1,1)
source = (rot_mat @ coord)[...,0]
x_mask = source[...,0]
y_mask = source[...,1]
mask = (
(x_mask >= 0)
& (x_mask < img.shape[0])
& (y_mask >= 0)
& (y_mask < img.shape[1])
).all(axis=-1)
# Clipping values to avoid IndexError
new[mask] = img[
x_mask[...,0][mask].round().astype(int).clip(None,img.shape[0] - 1),y_mask[...,1][mask].round().astype(int).clip(None,img.shape[1] - 1),]
plt.imsave("test.jpg",new)
if __name__ == "__main__":
rotate(img,angle)
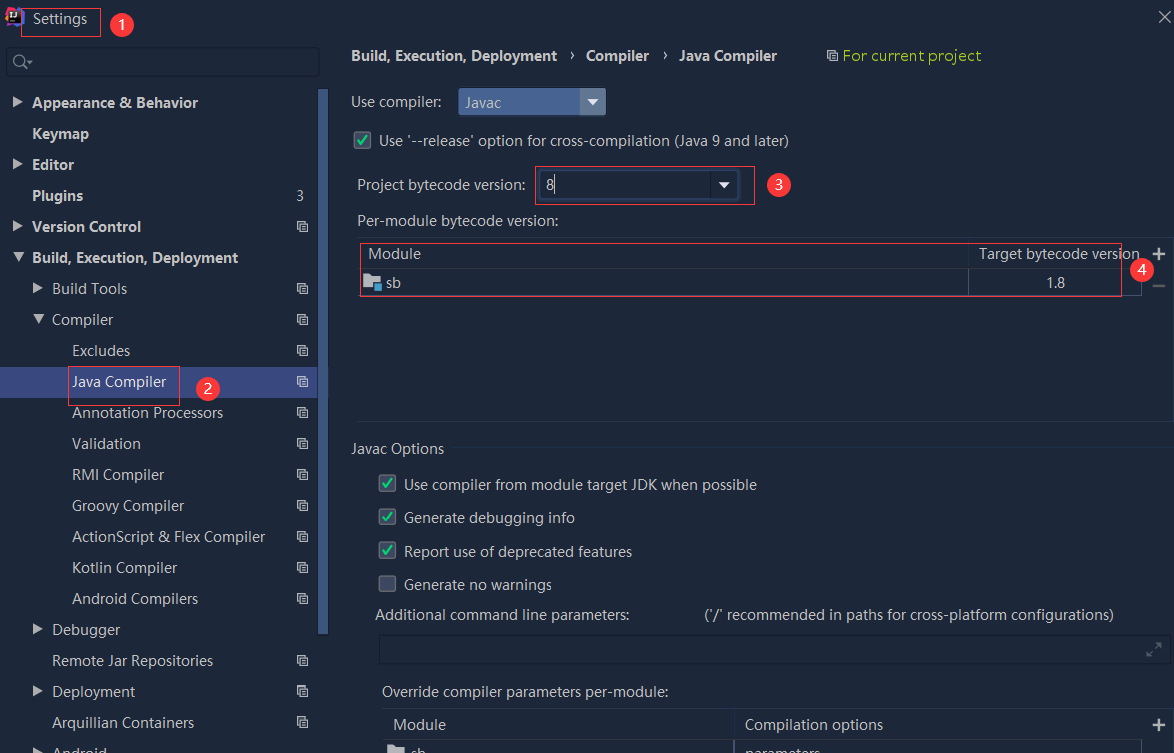 依赖报错 idea导入项目后依赖报错,解决方案:https://blog....
依赖报错 idea导入项目后依赖报错,解决方案:https://blog....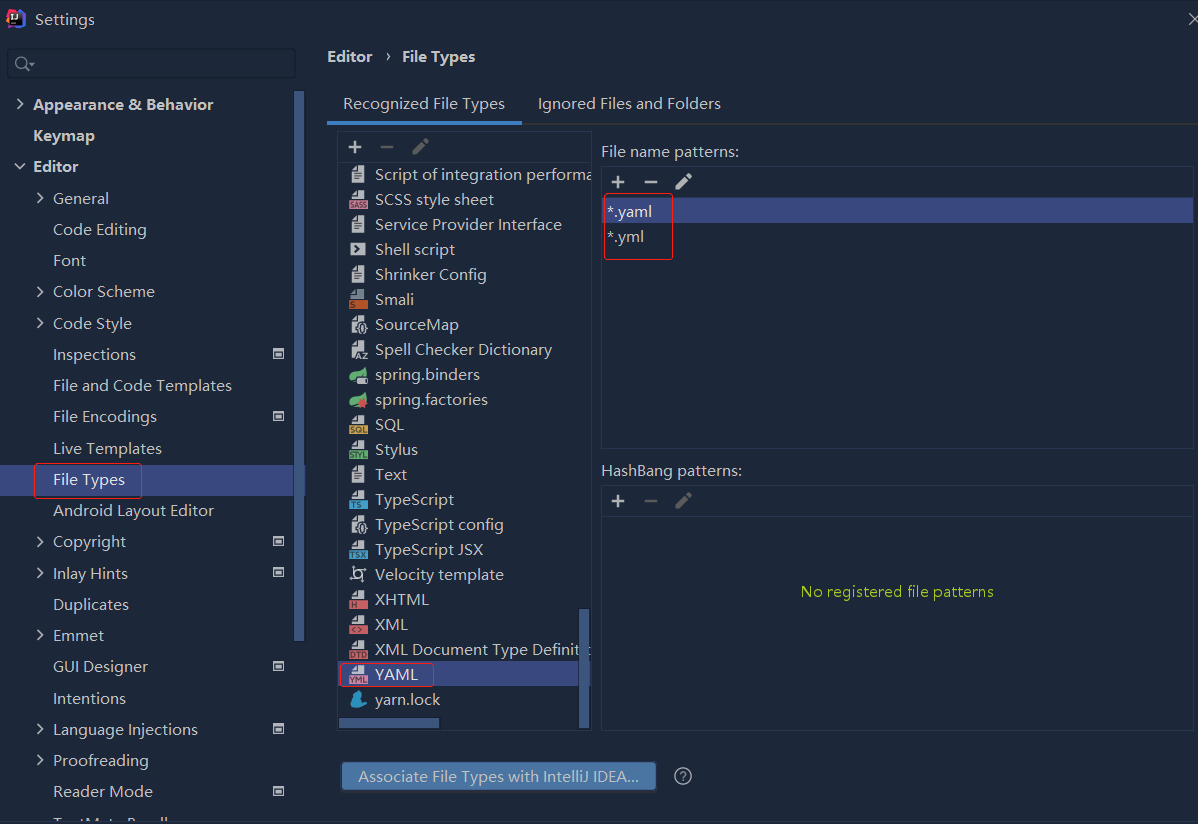
 错误1:gradle项目控制台输出为乱码 # 解决方案:https://bl...
错误1:gradle项目控制台输出为乱码 # 解决方案:https://bl...