问题描述
给出具有6个未知变量a_11,a_12,a_21,a_22,b_1,b_2和相应的三对点x1,y1,x2,y2,x3,y3,u1,v1,u2,v2,u3,v3的仿射变换方程:
u = a_11 * x + a_12 * y + b_1
v = a_21 * x + a_22 * y + b_2
是否可以通过这种形式获取a_11,b_2的解决方案?
a_11 = f1(x1,v3)
a_12 = f2(x1,v3)
a_21 = f3(x1,v3)
a_22 = f4(x1,v3)
b_1 = f5(x1,v3)
b_2 = f6(x1,v3)
我知道可以通过numpy.linalg.solve之类的线性系统求解器来求解该系统,但是我无法使用它,因此需要f1,f2,f3,f4,f5,f6才能包含常见的数学运算。
一般可以吗?哪些工具可用于求解此类方程组?似乎maple和mathematica具有方程式求解器,是否适合此任务?有其他选择吗?
解决方法
我假设您的意思是(x1,y1,u1,v1),(x2,y2,u2,v2)和(x3,y3,u3,v3)点满足方程式。在这种情况下,用那些替换为,将产生带有六个未知数的六个方程。许多系数为零或一。因此,通过一些取消,我们可以为您提供所需的解决方案。
您的解决方案(假设您具有线性独立性)是
a11 = ((u1-u2)(y2-y3)-(u2-u3)(y1-y2))/((x1-x2)(y2-y3)-((x2-x3)(y1-y2))
a12 = ((u1-u2)(x2-x3)-(u2-u3)(x1-x2))/((y1-y2)(x2-x3)-((y2-y3)(x1-x2))
a21 = ((v1-v2)(y2-y3)-(v2-v3)(y1-y2))/((x1-x2)(y2-y3)-((x2-x3)(y1-y2))
a22 = ((v1-v2)(x2-x3)-(v2-v3)(x1-x2))/((y1-y2)(x2-x3)-((y2-y3)(x1-x2))
b1 = u1-a11×x1-a12×y2
b2 = v1-a21×x1-a22×y2
我应该指出。这个问题更多关于mathoverflow。确实与编程无关。
,最后,我用sympy来解决这个方程组:
from sympy.solvers.solveset import linsolve
from sympy import *
#u1 = a_11 * x1 + a_12 * y1 + b_1
#v1 = a_21 * x1 + a_22 * y1 + b_2
#u2 = a_11 * x2 + a_12 * y2 + b_1
#v2 = a_21 * x2 + a_22 * y2 + b_2
#u3 = a_11 * x3 + a_12 * y3 + b_1
#v3 = a_21 * x3 + a_22 * y3 + b_2
a_11,a_12,a_21,a_22,b_1,b_2,x1,y1,x2,y2,x3,y3,u1,v1,u2,v2,u3,v3 = \
symbols('a_11,v3')
s = linsolve([a_11 * x1 + a_12 * y1 + b_1-u1,a_21 * x1 + a_22 * y1 + b_2-v1,a_11 * x2 + a_12 * y2 + b_1-u2,a_21 * x2 + a_22 * y2 + b_2-v2,a_11 * x3 + a_12 * y3 + b_1-u3,a_21 * x3 + a_22 * y3 + b_2-v3],(a_11,b_2))
print(s)
答案是:
a_11 = (u1 * y2 - u1 * y3 - u2 * y1 + u2 * y3 + u3 * y1 - u3 * y2) / (
x1 * y2 - x1 * y3 - x2 * y1 + x2 * y3 + x3 * y1 - x3 * y2)
a_12 = (-u1 * x2 + u1 * x3 + u2 * x1 - u2 * x3 - u3 * x1 + u3 * x2) / (
x1 * y2 - x1 * y3 - x2 * y1 + x2 * y3 + x3 * y1 - x3 * y2)
a_21 = (v1 * y2 - v1 * y3 - v2 * y1 + v2 * y3 + v3 * y1 - v3 * y2) / (
x1 * y2 - x1 * y3 - x2 * y1 + x2 * y3 + x3 * y1 - x3 * y2)
a_22 = (-v1 * x2 + v1 * x3 + v2 * x1 - v2 * x3 - v3 * x1 + v3 * x2) / (
x1 * y2 - x1 * y3 - x2 * y1 + x2 * y3 + x3 * y1 - x3 * y2)
b_1 = (u1 * x2 * y3 - u1 * x3 * y2 - u2 * x1 * y3 + u2 * x3 * y1 + u3 * x1 * y2 - u3 * x2 * y1) / (
x1 * y2 - x1 * y3 - x2 * y1 + x2 * y3 + x3 * y1 - x3 * y2)
b_2 = (v1 * x2 * y3 - v1 * x3 * y2 - v2 * x1 * y3 + v2 * x3 * y1 + v3 * x1 * y2 - v3 * x2 * y1) / (
x1 * y2 - x1 * y3 - x2 * y1 + x2 * y3 + x3 * y1 - x3 * y2)
但是看起来它可以简化。
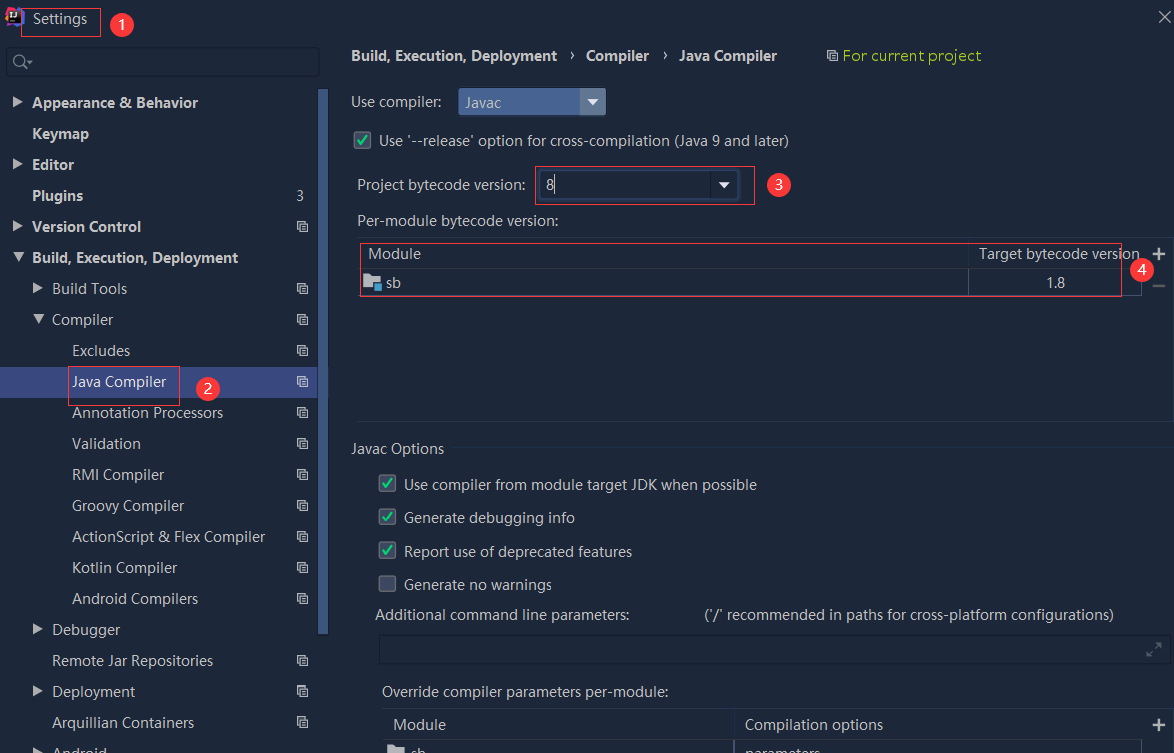 依赖报错 idea导入项目后依赖报错,解决方案:https://blog....
依赖报错 idea导入项目后依赖报错,解决方案:https://blog....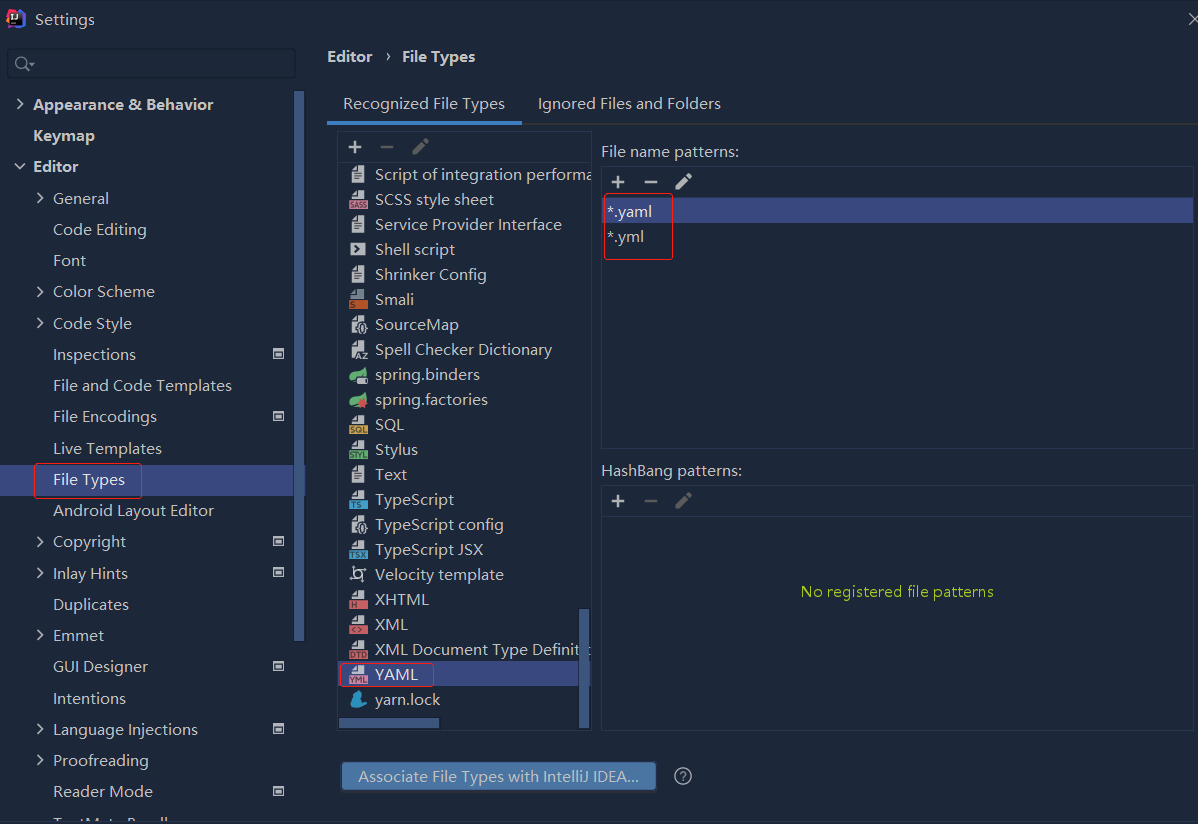
 错误1:gradle项目控制台输出为乱码 # 解决方案:https://bl...
错误1:gradle项目控制台输出为乱码 # 解决方案:https://bl...