问题描述
我从一辆检测到所有其他汽车的汽车进行了激光雷达扫描。我使用基于密度的聚类对单个汽车进行聚类,并从每个聚类中获得一个点来表示该汽车。
我想通过多个帧跟踪每个点的移动,但是由于大多数方法都依赖于计算机视觉,因此我不确定该如何处理,将图转换为图像然后使用OpenCV效率不高。我想知道是否有人可以建议其他方式?
此刻,两个后续帧中的群集是独立的,因此我无法确定它是否是相同的群集。关于如何“关联”集群的任何建议也将非常有帮助。
我可以将汽车表示为边界框而不是点,但我认为这种变化不会太大。
作为参考,这是第一次扫描的图解。随着汽车向前行驶,其他汽车变得越来越近,新车也越来越远。 
解决方法
暂无找到可以解决该程序问题的有效方法,小编努力寻找整理中!
如果你已经找到好的解决方法,欢迎将解决方案带上本链接一起发送给小编。
小编邮箱:dio#foxmail.com (将#修改为@)
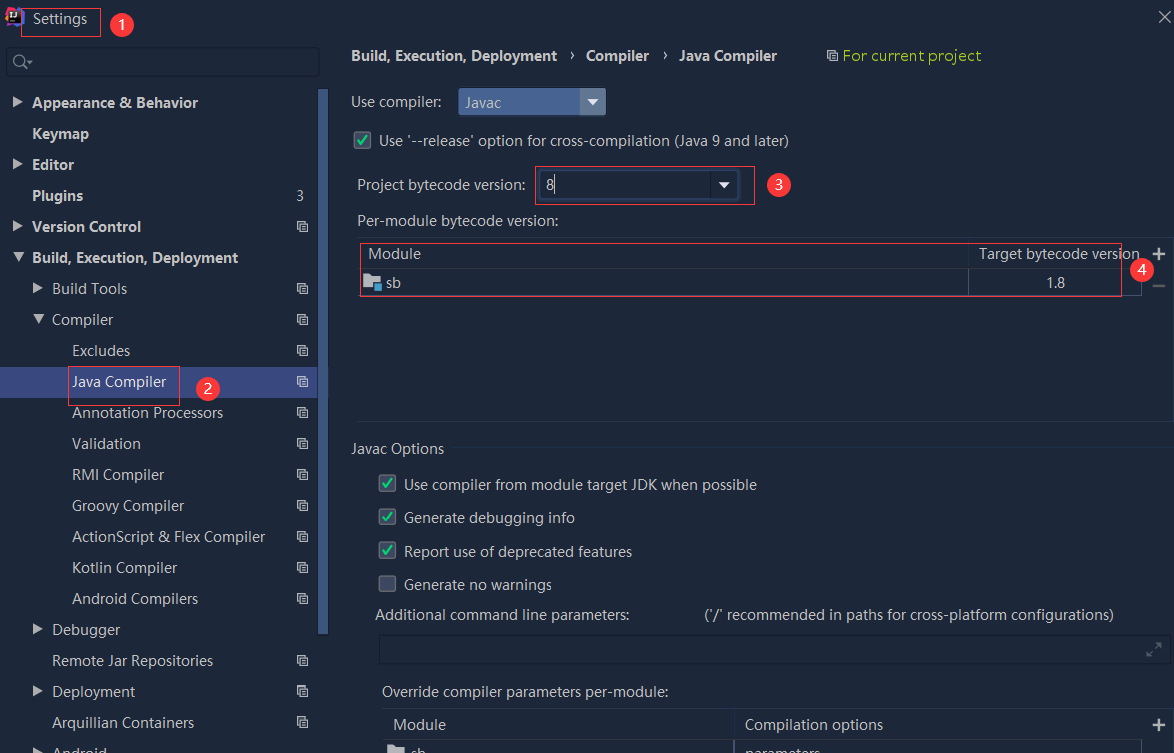 依赖报错 idea导入项目后依赖报错,解决方案:https://blog....
依赖报错 idea导入项目后依赖报错,解决方案:https://blog....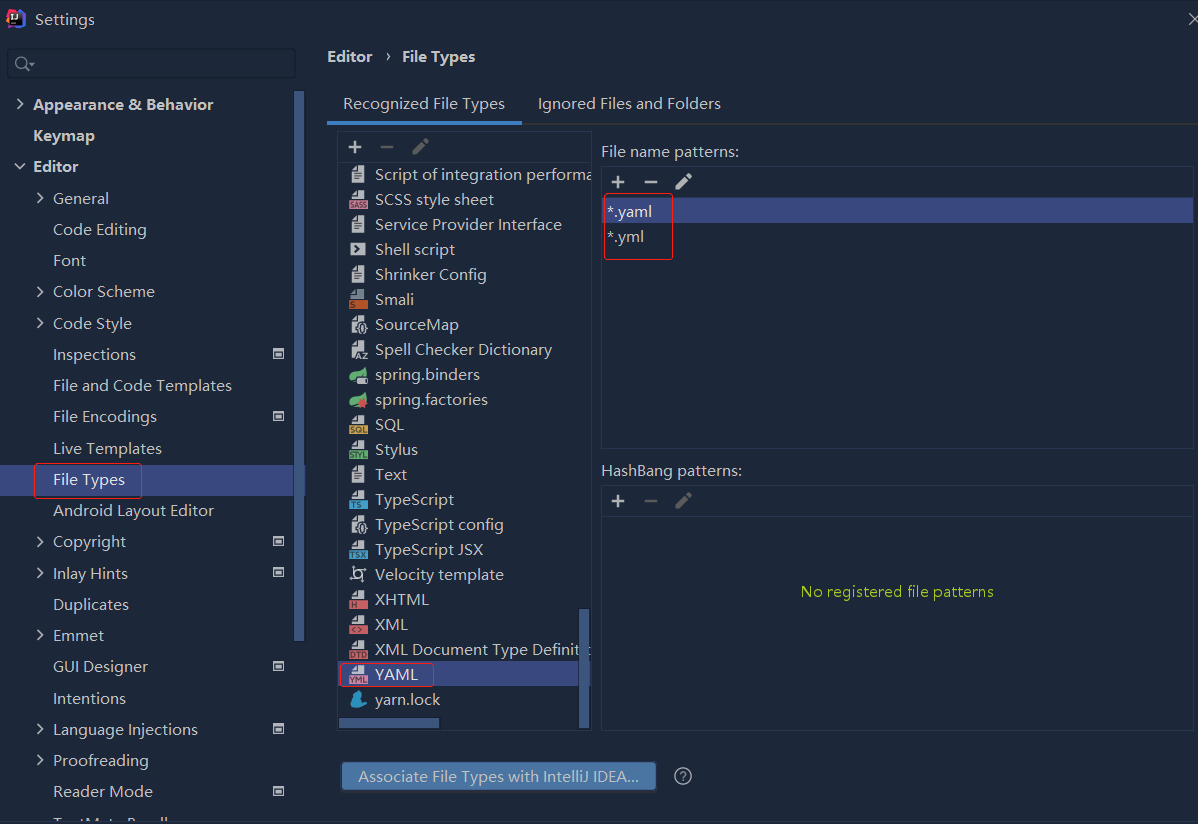
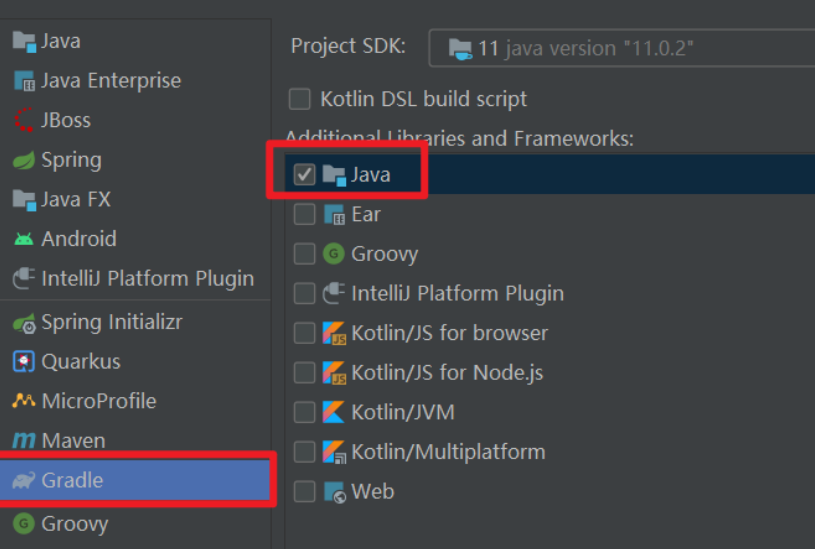 错误1:gradle项目控制台输出为乱码 # 解决方案:https://bl...
错误1:gradle项目控制台输出为乱码 # 解决方案:https://bl...